视觉 SLAM 14110 72 行代码 20 张图片 71
1 预备知识1.1 本书讲什么simultaneous localization and mapping
1.2 如何使用本书1.2.1 组织方式1.2.2 代码GitHub - gaoxiang12/slambook2: edition 2 of the slambook
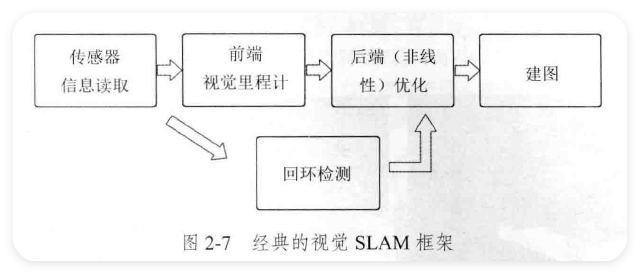
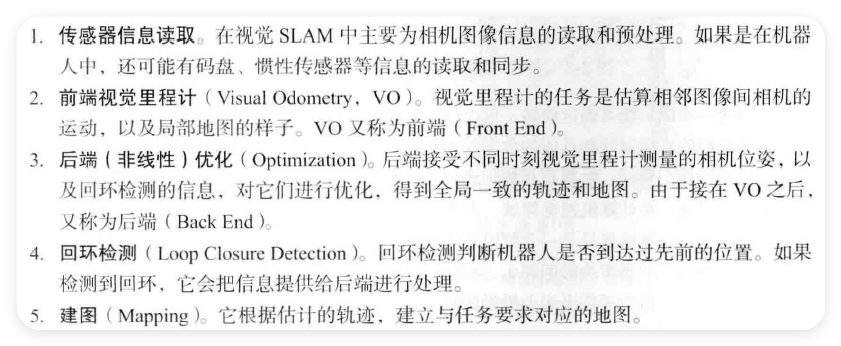
1.2.3 面向的读者 基础知识 : 高数线代概率论 C++ 语言基础(C++ 标准库,模板类,一部分 C++11Linux 基础 1.3 风格约定1.4 致谢和声明1.5 习题 题目 :有线性方程 \(A x=b\) \(A, b\) x A b A 答案 :线性方程组 \(Ax = b\) \(A\) \(A\) ) ,这样方程才有唯一解。如果 \(A\) \(A\) \(\displaystyle [A|b]\) 题目 :高斯分布是什么?它的一维形式是什么样子?它的高维形式是什么样子?答案 :高斯分布,也称为正态分布,是一种连续概率分布。一维高斯分布的数学表达式为 \(\displaystyle f (x) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(x-\mu)^2}{2\sigma^2}}\) \(\displaystyle \mu\) \(\displaystyle \sigma\) \(\displaystyle N (\mathbf{x}; \mathbf{\mu}, \Sigma)\) \(\displaystyle \mathbf{\mu}\) \(\displaystyle \Sigma\) 题目 :你知道 C++11 答案 :是的,C++11 是 C++ ) 、基于范围的 for lambda 表达式、智能指针等。除了 C++11 C++14C++17 和 C++20 题目 :如何在 Ubuntu ) ?这些软件被安装在什么地方?如果只知道模糊的软件名称(比如想要装一个名称中含有 Eigen ) ,应该如何安装它?答案 :软件安装:在 Ubuntu apt 来安装软件。基本命令为 sudo apt install [package-name]。 安装位置:软件通常被安装在 /usr/ 目录下,但具体的文件可能分布在多个子目录中。 模糊名称安装:如果只知道软件名称的一部分,可以使用 apt search 命令来搜索。例如,sudo apt search eigen 可以帮助找到所有包含 "eigen" 题目 :* 花一个小时学习 Vim vimtutor Vim IDE答案 : 2 初识 SLAM2.1 引子 : 自主运动能力 感知周边环境 安装于环境中(不太好反正) 机器人本体上 激光 SLAM 视觉 SLAM 单目(Monocular) 只能用一个摄像头 距离感 motion Structure Disparity Scale 但是无法确定深度 双目(Sterco) 两个相机的距离(基线 Baseline 配置与标定比较复杂 深度(RGB-D) 红外结构关 Time-of-Flight 主要用在室内,室外会有很多影响 还有一些非主流的 : 2.2 经典视觉 SLAM 在外界换几个比较稳定的情况下,SLAM 技术已经比较成熟 2.2.1 视觉里程计 只通过视觉里程计来估计轨迹会出现累积漂移(Accumulating Drift) 。 所以需要回环检测与后端优化 2.2.2 后端优化 最大后验概率估计(Maximum-a-Posteriori MAP) 前端 后端 对运动主体自身和周围环境空间不确定性的估计 2.2.3 回环检测2.2.4 建图2.3 SLAM 问题的数学表述 运动方程 \(\displaystyle \quad\boldsymbol{x}_k=f\left(\boldsymbol{x}_{k-1},\boldsymbol{u}_k,\boldsymbol{w}_k\right).\) \(\displaystyle \boldsymbol{u}_{k}\) \(\displaystyle \boldsymbol{w}_{k}\) 观测方程 \(\displaystyle \boldsymbol{z}_{k,j} = h (\boldsymbol{y}_{j},\boldsymbol{x}_{k},\boldsymbol{v}_{k,j})\) \(\displaystyle \boldsymbol{v}_{k,j}\) 又很多参数化的方式 可以总结为如下两个方程 \[ \begin{cases}\boldsymbol{x}_k=f\left(\boldsymbol{x}_{k-1},\boldsymbol{u}_k,\boldsymbol{w}_k\right),&k=1,\cdots,K\\\boldsymbol{z}_{k,j}=h\left(\boldsymbol{y}_j,\boldsymbol{x}_k,\boldsymbol{v}_{k,j}\right),&(k,j)\in\mathcal{O}\end{cases}. \]
知道运动测量的读数 \(\displaystyle \boldsymbol{u}\) \(\displaystyle \boldsymbol{z}\) 状态估计问题 : Linear Gaussian -> Kalman Filter Non-Linear Non-Gaussian -> Extended Kalman Filter 和非线性优化EKF -> Particle Filter -> Graph Optimization 2.4 实践 : 2.4.1 安装 Linux 2.4.2 Hello SLAM 2.4.3 使用 cmakeText Only 对中间文件的处理 :
Text Only 2.4.4 使用库Text Only Text Only Text Only C++ #include "libHelloSLAM.h"
int main ( int argc , char ** argv ) {
printHello ();
return 0 ;
}
在 CMakeLists. txt : Text Only 2.4.5 使用 IDE3 三维空间刚体运动3.1 旋转矩阵3.1.1 点、向量和坐标系\[ a\times b = \begin{Vmatrix}e_1&e_2&e_3\\ \\ a_1&a_2&a_3\\ \\ b_1&b_2&b_3 \\ \end{Vmatrix} = \begin{bmatrix} a_2b_3-a_3b_2\\ \\ a_3b_1-a_1b_3\\ \\ a_1b_2-a_2b_1 \end{bmatrix} = \begin{bmatrix} 0&-a_3&a_2\\ \\ a_3&0&-a_1\\ \\ -a_2&a_1&0 \end{bmatrix} \boldsymbol{b}\overset{\mathrm{def}}{\operatorname*{=}}\boldsymbol{a}^{\wedge}\boldsymbol{b}. \]
\[ \displaystyle \boldsymbol{a}^{\wedge}=\begin{bmatrix} 0 & -a_{3} & a_{2} \\ a_{3} & 0 & -a_{1} \\ -a_{2} & a_{1} & 0 \end{bmatrix} \]
3.1.2 坐标系间的欧式变换\[ \begin{bmatrix}a_1\\ \\ a_2\\\\a_3\end{bmatrix}=\begin{bmatrix}e_1^\mathrm{T}e_1^{\prime}&e_1^\mathrm{T}e_2^{\prime}&e_1^\mathrm{T}e_3^{\prime}\\e_2^\mathrm{T}e_1^{\prime}&e_2^\mathrm{T}e_2^{\prime}&e_2^\mathrm{T}e_3^{\prime}\\e_3^\mathrm{T}e_1^{\prime}&e_3^\mathrm{T}e_2^{\prime}&e_3^\mathrm{T}e_3^{\prime}\end{bmatrix}\begin{bmatrix}a_1^{\prime}\\\\a_2^{\prime}\\\\a_3^{\prime}\end{bmatrix}\stackrel{\mathrm{def}}{=}Ra^{\prime} \]
\(\displaystyle \boldsymbol{R}\) Special Orthogonal Group \(\displaystyle \mathrm{SO}(n)=\{\boldsymbol{R}\in \mathbb{R}^{n \times n}|\boldsymbol{R}\boldsymbol{R}^{\mathrm{T}}=\boldsymbol{I},\det(\boldsymbol{R})=1\}\) \(\displaystyle a^{\prime}=R^{-1}a=R^{\intercal}a.\) 旋转 + : \(\displaystyle a^{\prime}=Ra+t.\) 3.1.3 变换矩阵与齐次坐标 但是这里的变换关系不是一个线性关系 \(\displaystyle c=R_2\left(R_1a+t_1\right)+t_2\) 我们改写一下形式 : \(\displaystyle \begin{bmatrix}a'\\\\1\end{bmatrix}=\begin{bmatrix}R&t\\\\\mathbf{0}^\mathrm{T}&1\end{bmatrix}\begin{bmatrix}a\\\\1\end{bmatrix}\overset{\mathrm{def}}{=}T\begin{bmatrix}a\\\\1\end{bmatrix}\) 这就是齐次坐标,\(\displaystyle \boldsymbol{T}\) \(\displaystyle \tilde{b}=T_1\tilde{\boldsymbol{a}}, \tilde{\boldsymbol{c}}=T_2\tilde{\boldsymbol{b}}\quad\Rightarrow\tilde{\boldsymbol{c}}=T_2T_1\tilde{\boldsymbol{a}}.\) 并且 \(\displaystyle \boldsymbol{T}\) \(\displaystyle \mathrm{SE}(3)=\left\{T=\begin{bmatrix}R&t\\\mathbf{0}^\mathrm{T}&1\end{bmatrix}\in\mathbb{R}^{4\times4}|\boldsymbol{R}\in\mathrm{SO}(3),\boldsymbol{t}\in\mathbb{R}^3\right\}\) \(\displaystyle T^{-1}=\begin{bmatrix}R^\mathrm{T}&-R^\mathrm{T}t\\0^\mathrm{T}&1\end{bmatrix}\) 在 C++ 3.2 实践 :EigenC++ #include <iostream>
using namespace std ;
#include <ctime>
#include <eigen3>
using namespace Eigen ;
#define MATRIX_SIZE 50
int main ( int argc , char ** argv ) {
Matrix < float , 2 , 3 > matrix_23 ;
// 如下都是三维向量
Vector3d v_3d ;
Matrix < float , 3 , 1 > vd_3d ;
// 如下是3*3矩阵
Matrix3d matrix_33 = Matrix3d :: Zero ();
// 两个动态分配
Matrix < double , Dynamic , Dynamic > matrix_dynamic ;
MatrixXd matrix_x ;
matrix_23 << 1 , 2 , 3 , 4 , 5 , 6 ;
cout << "matrix 2*3 from 1 to 6: \n " << matrix_23 << endl ;
cout << "print matrix 2*3:" << endl ;
for ( int i = 0 ; i < 2 ; i ++ ) {
for ( int j = 0 ; j < 3 ; j + ) cout << matrix_23 ( i , j ) << " \t " ;
cout << endl ;
}
v_3d << 3 , 2 , 1 ;
vd_3d << 4 , 5 , 6 ;
Matrix < double , 2 , 1 > result = matrix_23 . cast < double > () * v_3d ;
cout << "[1, 2, 3; 4, 5, 6] * [3, 2, 1] =" << result . transpose () << endl ;
matrix_22 = Matrix3d :: Random ();
// 一些矩阵的操作:
// transpose()
// sum()
// trace()
// inverse()
// determinant()
SelfAdjointEigenSolver < Matrix3d > eigen_solver ( matrix_33 . transpose () * matrix_33 );
cout << eigen_solver . eigenvalues () << endl ;
cout << eigen_solver . eigenvectors () << endl ;
// solve the equation
Matrix < double , MATRIX_SIZE , MATRIX_SIZE > matrix_NN = MatrixXd :: Random ( MATRIX_SIZE , MATRIX_SIZE );
matrix_NN = matrix_NN * matrix_NN . transpose ()
Matrix < double , MATRIX_SIZE , 1 > v_Nd = MatrixXd :: random ( MATRIX_SIZE , 1 );
// 第一种:直接求逆
Matrix < double , MATRIX_SIZE , 1 > x = matrix_NN . inverse () * v_Nd ;
// 第二种:矩阵分解
x = matrix_NN . colPivHouseholderQr (). solve ( v_Nd );
}
3.3 旋转向量和欧拉角3.3.1 旋转向量 Axis-Angle Rodrigues's Formula \(\displaystyle \boldsymbol{R}=\cos\theta\boldsymbol{I}+\left(1-\cos\theta\right)\boldsymbol{n}\boldsymbol{n}^\mathrm{T}+\sin\theta\boldsymbol{n}^\mathrm{\wedge}.\) \[ \begin{aligned} \mathrm{tr}\left(R\right)& =\cos\theta\operatorname{tr}\left(\boldsymbol{I}\right)+\left(1-\cos\theta\right)\operatorname{tr}\left(\boldsymbol{n}\boldsymbol{n}^\mathrm{T}\right)+\sin\theta\operatorname{tr}(\boldsymbol{n}^\mathrm{\Lambda}) \\ &=3\cos\theta+(1-\cos\theta) \\ &=1+2\cos\theta \end{aligned} \]
thus:
\[ \theta=\arccos\frac{\mathrm{tr}(R)-1}{2}. \]
\[ Rn=n. \]
即 \(\displaystyle \boldsymbol{n}\) \(\displaystyle \boldsymbol{R}\) 1 3.3.2 欧拉角 比较常用的一种 yaw-pitch-roll 但会有 Gimbal Lock 3.4 四元数3.4.1 四元数的定义 我们找不到不带奇异性的三位向量描述方式 Quaternion \(\displaystyle q=q_0+q_1\mathrm{i}+\mathrm{q}_2\mathrm{j}+\mathrm{q}_3\mathrm{k}\) \[ \begin{cases}\mathbf{i}^2=\mathbf{j}^2=\mathbf{k}^2=-1\\\mathbf{ij}=\mathbf{k},\mathbf{ji}=-\mathbf{k}\\\mathbf{jk}=\mathbf{i},\mathbf{kj}=-\mathbf{i}\\\mathbf{ki}=\mathbf{j},\mathbf{ik}=-\mathbf{j}\end{cases} \]
( 也许可以用度规来表示?)\(\displaystyle \boldsymbol{q}=\left[s,\boldsymbol{v}\right]^\mathrm{T},\quad s=q_0\in\mathbb{R},\quad\boldsymbol{v}=\left[q_1,q_2,q_3\right]^\mathrm{T}\in\mathbb{R}^3.\) 书上没写直观的几何对应 3.4.2 四元数的运算 乘法 : \(\displaystyle \boldsymbol{q}_a\boldsymbol{q}_b=\begin{bmatrix}s_as_b-\boldsymbol{v}_a^\mathrm{T}\boldsymbol{v}_b,s_a\boldsymbol{v}_b+s_b\boldsymbol{v}_a+\boldsymbol{v}_a\times\boldsymbol{v}_b\end{bmatrix}^\mathrm{T}.\) 共轭 : \(\displaystyle q_a^*=s_a-x_a\mathrm{i}-\mathrm{y_aj}-\mathrm{z_ak}=[\mathrm{s_a},-\mathrm{v_a}]^\mathrm{T}.\) \(\displaystyle q^*q=qq^*=[s_a^2+\boldsymbol{v}^\mathrm{T}\boldsymbol{v},\boldsymbol{0}]^\mathrm{T}.\) 逆 : \(\displaystyle q^{-1}=q^*/\|q\|^2.\) \(\displaystyle (\boldsymbol{q}_a\boldsymbol{q}_b)^{-1}=\boldsymbol{q}_b^{-1}\boldsymbol{q}_a^{-1}.\) 3.4.3 用四元数表示旋转 先表示三维空间点 : \(\displaystyle p=[0,x,y,z]^{\mathrm{T}}=[0,\boldsymbol{v}]^{\mathrm{T}}.\) 再旋转 : \(\displaystyle p'=qpq^{-1}.\) 3.4.4 四元数到其他旋转表示的转换 设 \(\displaystyle \boldsymbol{q} = [s,\boldsymbol{v}]^\mathrm{T}\) \(\displaystyle \boldsymbol{q}^+=\begin{bmatrix}s&-\boldsymbol{v}^\mathrm{T}\\\\\boldsymbol{v}&s\boldsymbol{I}+\boldsymbol{v}^\wedge\end{bmatrix},\quad\boldsymbol{q}^\oplus=\begin{bmatrix}s&-\boldsymbol{v}^\mathrm{T}\\\\\boldsymbol{v}&s\boldsymbol{I}-\boldsymbol{v}^\wedge\end{bmatrix}.\) \(\displaystyle q_1^+q_2=\begin{bmatrix}s_1&-\boldsymbol{v}_1^\mathrm{T}\\\\\boldsymbol{v}_1&s_1\boldsymbol{I}+\boldsymbol{v}_1^\wedge\end{bmatrix}\begin{bmatrix}s_2\\\\\boldsymbol{v}_2\end{bmatrix}=\begin{bmatrix}-\boldsymbol{v}_1^\mathrm{T}\boldsymbol{v}_2+s_1s_2\\\\s_1\boldsymbol{v}_2+s_2\boldsymbol{v}_1+\boldsymbol{v}_1^\wedge\boldsymbol{v}_2\end{bmatrix}=\boldsymbol{q}_1\boldsymbol{q}_2.\) 同理可证 : \(\displaystyle q_1q_2=q_1^+q_2=q_2^\oplus q_1.\) 再来考虑旋转 : \(\displaystyle \begin{aligned}p^{\prime}&=qpq^{-1}=q^{+}p^{+}q^{-1}\\&=q^{+}q^{-1^{\oplus}}p.\end{aligned}\) 于是可以得到 : \(\displaystyle \boldsymbol{q}^{+}\big(\boldsymbol{q}^{-1}\big)^{\oplus}=\begin{bmatrix}s&-\boldsymbol{v}^{\mathrm{T}}\\\boldsymbol{v}&s\boldsymbol{I}+\boldsymbol{v}^{\wedge}\end{bmatrix}\begin{bmatrix}s&\boldsymbol{v}^{\mathrm{T}}\\-\boldsymbol{v}&s\boldsymbol{I}+\boldsymbol{v}^{\wedge}\end{bmatrix}=\begin{bmatrix}1&\boldsymbol{0}\\\boldsymbol{0}^{\mathrm{T}}&\boldsymbol{v}\boldsymbol{v}^{\mathrm{T}}+s^{2}\boldsymbol{I}+2s\boldsymbol{v}^{\wedge}+\left(\boldsymbol{v}^{\wedge}\right)^{2}\end{bmatrix}.\) 即 : \(\displaystyle R=\boldsymbol{v}\boldsymbol{v}^\mathrm{T}+s^2\boldsymbol{I}+2s\boldsymbol{v}^\wedge+\left(\boldsymbol{v}^\wedge\right)^2.\) \[ \begin{aligned} \operatorname{tr}(R)& =\mathbf{tr}(\boldsymbol{vv}^\mathrm{T}+3s^2+2s\cdot0+\mathbf{tr}((\boldsymbol{v}^\wedge)^2) \\ &=v_{1}^{2}+v_{2}^{2}+v_{3}^{2}+3s^{2}-2(v_{1}^{2}+v_{2}^{2}+v_{3}^{2}) \\ &=(1-s^2)+3s^2-2(1-s^2) \\ &=4s^2-1. \end{aligned} \]
即 \(\displaystyle \theta=2\arccos s.\) 再加上旋转轴 : \[ \begin{cases}\theta=2\arccos q_0\\ [n_x,n_y,n_z]^\mathrm{T}=[q_1,q_2,q_3]^\mathrm{T}/\sin\frac{\theta}{2}\end{cases}. \]
3.5 相似、仿射、射影变换 相似变换 : \[ \boldsymbol{T}_S=\begin{bmatrix}s\boldsymbol{R}&t\\\mathbf{0}^\mathrm{T}&1\end{bmatrix}. \]
允许缩放,相似变换群 : Sim (3)
\[ T_A=\begin{bmatrix}A&t\\\mathbf{0}^\mathrm{T}&1\end{bmatrix}. \]
只保证平行关系
\[ T_P=\begin{bmatrix}A&t\\\\a^\mathrm{T}&v\end{bmatrix}. \]
总结一下 :
\[ \begin{array}{c|c|c|c}\hline\text{变换名称}&\text{矩阵形式}&\text{自由度}&\text{不变性质}\\\hline\text{欧氏变换}&\begin{bmatrix}R&t\\0^\mathrm{T}&1\end{bmatrix}&6&\text{长度、夹角、体积}\\\text{相似变换}&\begin{bmatrix}sR&t\\0^\mathrm{T}&1\end{bmatrix}&7&\text{体积比}\\\text{仿射变换}&\begin{bmatrix}A&t\\0^\mathrm{T}&1\end{bmatrix}&12&\text{平行性、体积比}\\\text{射影变换}&\begin{bmatrix}A&t\\a^\mathrm{T}&v\end{bmatrix}&15&\text{接触平面的相交和相切}\\\hline\end{array} \]
3.6 实践 : Eigen 3.6.1 Eigen 几何模块的数据演示再说吧。
3.6.2 实际的坐标变换例子TODO
3.7 可视化演示3.7.1 显示运动轨迹3.7.2 显示相机的位姿3.8 习题TODO
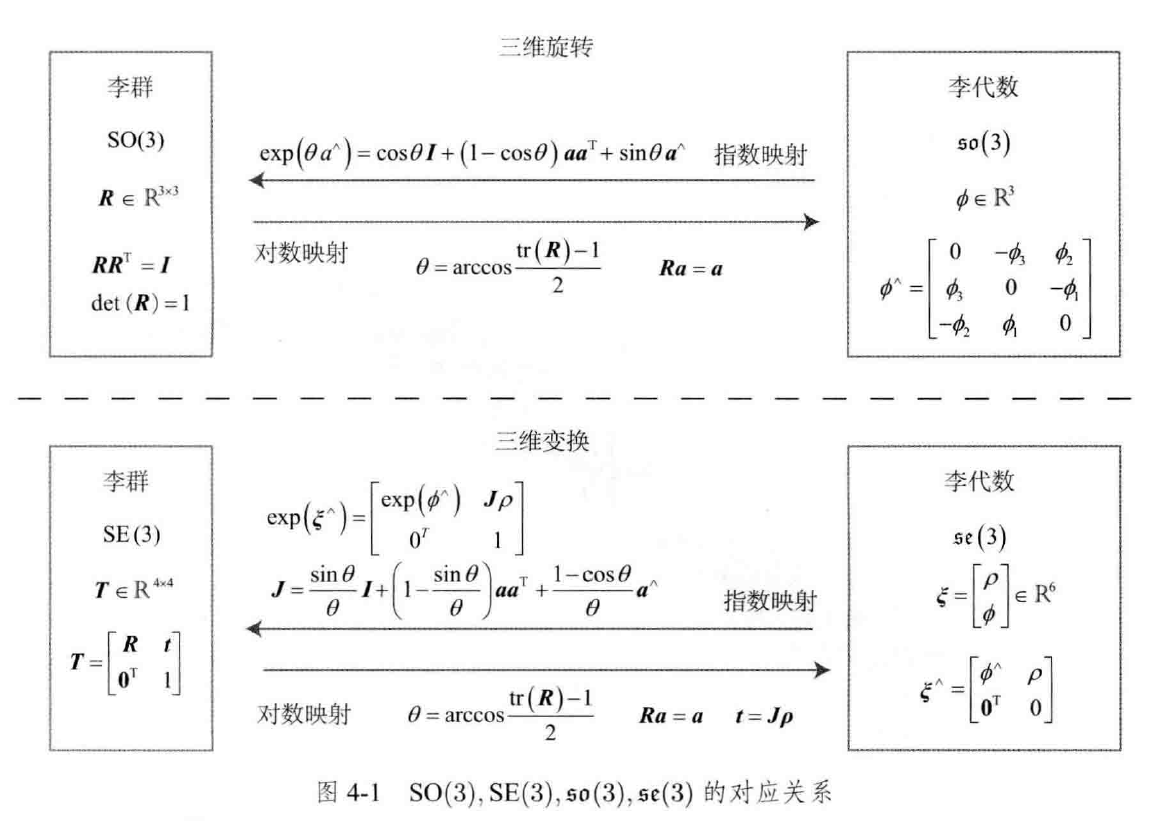
4 李群和李代数 由于旋转矩阵本身带有约束(正交且行列式为 1) ,让优化变得困难。 所以我们引入李群 - 4.1 李群和李代数基础 三维旋转矩阵构成了特殊正交群 \(\displaystyle \boldsymbol{SO}(3)\) 变换矩阵构成了特殊欧氏群 \(\displaystyle \boldsymbol{SE}(3)\) 4.1.1 群 \(\displaystyle G = (A,\cdot)\) :李群是具有连续(光滑)性质的群 4.1.2 李代数的引出 \(\displaystyle \boldsymbol{R}\boldsymbol{R}^\mathrm{T} = \boldsymbol{I}\) 我们易得 : \(\displaystyle \dot{\boldsymbol{R}}(t)\boldsymbol{R}(t)^\mathrm{T}=-\left(\dot{\boldsymbol{R}}(t)\boldsymbol{R}(t)^\mathrm{T}\right)^\mathrm{T}.\) 即 \(\displaystyle \dot{\boldsymbol{R}}(t)\boldsymbol{R}(t)^\mathrm{T}\) 而对于任意反对称矩阵,我们都可以找到唯一与之对应的向量 \(\displaystyle \dot{\boldsymbol{R}}(t)\boldsymbol{R}(t)^\mathrm{T}=\boldsymbol{\phi}(t)^{\wedge}.\) \(\displaystyle \dot{\boldsymbol{R}}(t)=\phi(t)^{\wedge}\boldsymbol{R}(t)=\begin{bmatrix}0&-\phi_3&\phi_2\\\phi_3&0&-\phi_1\\-\phi_2&\phi_1&0\end{bmatrix}\boldsymbol{R}(t).\) \(\displaystyle t_{0} = 0\) 和 \(\displaystyle \boldsymbol{R}(0) = \boldsymbol{I}\) 时: \[ \begin{aligned} R(t)& \approx\boldsymbol{R}\left(t_{0}\right)+\dot{\boldsymbol{R}}\left(t_{0}\right)\left(t-t_{0}\right) \\ &=I+\phi(t_0)^{\wedge}(t). \end{aligned} \]
于是求导 -> \(\displaystyle \phi\) \(\displaystyle \boldsymbol{SO}(3)\) \(\displaystyle t_{0}\) 附近,\(\displaystyle \phi\) 保持常数 \(\displaystyle \phi(t_{0})=\phi_{0}\) ,
\[ \dot{\boldsymbol{R}}(t)=\boldsymbol{\phi}(t_0)^\wedge\boldsymbol{R}(t)=\boldsymbol{\phi}_0^\wedge\boldsymbol{R}(t). \]
再有 \(\displaystyle \boldsymbol{R}(0) = \boldsymbol{I}\) :
\[ \boldsymbol{R}(t)=\exp\left(\boldsymbol{\phi}_{0}^{\wedge}t\right). \]
\(\displaystyle \phi\) \(\displaystyle SO(3)\) \(\displaystyle \mathfrak{so}(3)\) \(\displaystyle \begin{aligned}&\text{其次,给定某个向量 }\phi\text{ 时,矩阵指数}\exp(\phi^{\wedge})\text{ 如何计算? 反之,给定 }R\text{ 时,能否有相反}\\&\text{的运算来计算 }\phi?\text{ 事实上,这正是李群与李代数间的指数}/\text{对数映射。}\end{aligned}\) 4.1.3 李代数的定义李代数由一个集合 \(\displaystyle \mathbb{V}\) \(\displaystyle \mathbb{F}\) \(\displaystyle [,]\) ( \(\displaystyle \mathbb{V},\mathbb{F},[,]\) ) \(\displaystyle \mathfrak{g}\)
封闭性 双线性 自反性 \(\displaystyle \quad\forall \boldsymbol{X}\in\mathbb{V},[\boldsymbol{X},\boldsymbol{X}]=0\) 雅可比等价 \(\displaystyle \forall X,Y,Z\in\mathbb{V},[X,[Y,Z]]+[Z,[X,Y]]+[Y,[Z,X]]=0.\) 4.1.4 李代数 \(\displaystyle \mathfrak{so}(3)\) \(\displaystyle \boldsymbol{\Phi}=\boldsymbol{\phi}^{\wedge}=\begin{bmatrix}0&-\phi_3&\phi_2\\\\\phi_3&0&-\phi_1\\\\-\phi_2&\phi_1&0\end{bmatrix}\in\mathbb{R}^{3\times3}.\) \(\displaystyle \phi_{1},\phi_{2}\) 的李括号为:
\[ [\phi_1,\phi_2]=(\boldsymbol{\Phi}_1\boldsymbol{\Phi}_2-\boldsymbol{\Phi}_2\boldsymbol{\Phi}_1)^\vee. \]
\[ \mathfrak{so}(3)=\left\{\phi\in\mathbb{R}^3,\boldsymbol{\Phi}=\phi^\wedge\in\mathbb{R}^{3\times3}\right\}. \]
\[ R=\exp(\phi^{\wedge}). \]
4.1.5 李代数 \(\displaystyle \mathfrak{se}(3)\) \[ \mathfrak{se}(3)=\left\{\boldsymbol{\xi}=\begin{bmatrix}\boldsymbol{\rho}\\\boldsymbol{\phi}\end{bmatrix}\in\mathbb{R}^6,\boldsymbol{\rho}\in\mathbb{R}^3,\boldsymbol{\phi}\in\mathfrak{so}(3),\boldsymbol{\xi}^\wedge=\begin{bmatrix}\boldsymbol{\phi}^\wedge&\boldsymbol{\rho}\\\boldsymbol{0}^\mathrm{T}&0\end{bmatrix}\in\mathbb{R}^{4\times4}\right\}. \]
前三维为平移,后三维为旋转(实质上是 \(\displaystyle \mathfrak{so}(3)\)
\[ \xi^\wedge=\begin{bmatrix}\phi^\wedge&\rho\\0^\mathrm{T}&0\end{bmatrix}\in\mathbb{R}^{4\times4}. \]
同样李代数 \(\displaystyle \mathfrak{se}(3)\) \(\displaystyle \mathfrak{so}(3)\) :
\[ [\xi_1,\xi_2]=\left(\xi_1^\wedge\xi_2^\wedge-\xi_2^\wedge\xi_1^\wedge\right)^\vee. \]
4.2 指数与对数映射4.2.1 SO(3) 上的指数映射 Exponential Map 首先任意矩阵的指数映射可以写成一个泰勒展开(收敛的时候) \[ \exp(A)=\sum_{n=0}^\infty\frac1{n!}A^n. \]
应用到 \(\displaystyle \mathfrak{so}(3)\) : \[ \exp(\phi^\wedge)=\sum_{n=0}^\infty\frac{1}{n!}(\phi^\wedge)^n. \]
我们可以把 \(\displaystyle \phi\) \(\displaystyle \theta \boldsymbol{a}\) \(\displaystyle \boldsymbol{a}^\wedge\) : \[ \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}=\begin{bmatrix}-a_2^2-a_3^2&a_1a_2&a_1a_3\\\\a_1a_2&-a_1^2-a_3^2&a_2a_3\\\\a_1a_3&a_2a_3&-a_1^2-a_2^2\end{bmatrix}=\boldsymbol{a}\boldsymbol{a}^\mathrm{T}-\boldsymbol{I}, \]
和
\[ a^{\wedge}a^{\wedge}a^{\wedge}=a^{\wedge}(aa^{\mathrm{T}}-I)=-a^{\wedge}. \]
于是我们可以化简 :
\[ \begin{aligned} \exp\left(\phi^\wedge\right)& =\exp\left(\theta\boldsymbol{a}^\wedge\right)=\sum_{n=0}^\infty\frac1{n!}\left(\theta\boldsymbol{a}^\wedge\right)^n \\ &=I+\theta\boldsymbol{a}^{\wedge}+\frac{1}{2!}\theta^{2}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\frac{1}{3!}\theta^{3}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\frac{1}{4!}\theta^{4}(\boldsymbol{a}^{\wedge})^{4}+\cdots \\ &=\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\theta\boldsymbol{a}^{\wedge}+\frac{1}{2!}\theta^{2}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}-\frac{1}{3!}\theta^{3}\boldsymbol{a}^{\wedge}-\frac{1}{4!}\theta^{4}(\boldsymbol{a}^{\wedge})^{2}+\cdots \\ &=\boldsymbol{a}\boldsymbol{a}^{\mathsf{T}}+\underbrace{\left(\theta-\frac{1}{3!}\theta^{3}+\frac{1}{5!}\theta^{5}-\cdots\right)}_{\sin\theta}\boldsymbol{a}^{\wedge}-\underbrace{\left(1-\frac{1}{2!}\theta^{2}+\frac{1}{4!}\theta^{4}-\cdots\right)}_{\cos\theta}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge} \\ &=a^\wedge a^\wedge+I+\sin\theta a^\wedge-\cos\theta a^\wedge a^\wedge \\ &=(1-\cos\theta)\boldsymbol{a}^\wedge\boldsymbol{a}^\wedge+\boldsymbol{I}+\sin\theta\boldsymbol{a}^\wedge \\ &=\cos\theta\boldsymbol{I}+(1-\cos\theta)\boldsymbol{aa}^\mathrm{T}+\sin\theta\boldsymbol{a}^\mathrm{\wedge}. \end{aligned} \]
最后得到 :
\[ \exp(\theta\boldsymbol{a}^\wedge)=\cos\theta\boldsymbol{I}+(1-\cos\theta)\boldsymbol{a}\boldsymbol{a}^\mathrm{T}+\sin\theta\boldsymbol{a}^\wedge. \]
所以 \(\displaystyle \mathfrak{so}(3)\)
通过上面的公式,我们可以把 \(\displaystyle \mathfrak{so}(3)\) SO (3) 反过来也是可以的 \[ \phi=\ln\left(\boldsymbol{R}\right)^\vee=\left(\sum_{n=0}^\infty\frac{\left(-1\right)^n}{n+1}\left(\boldsymbol{R}-\boldsymbol{I}\right)^{n+1}\right)^\vee. \]
4.2.2 SE (3) 上的指数映射同样的推导方式 :
\[ \begin{aligned} \exp\left(\xi^{\wedge}\right)& =\begin{bmatrix}\sum_{n=0}^{\infty}\frac{1}{n!}(\phi^{\wedge})^{n}&\sum_{n=0}^{\infty}\frac{1}{(n+1)!}(\phi^{\wedge})^{n}\rho\\\\\mathbf{0}^{\mathrm{T}}&1\end{bmatrix} \\ &\stackrel{\Delta}{=}\begin{bmatrix}R&J\rho\\\\0^\mathrm{T}&1\end{bmatrix}=T. \end{aligned} \]
\[ \begin{aligned} \sum_{n=0}^{\infty}\frac{1}{(n+1)!}(\phi^{\wedge})^{n}& =\boldsymbol{I}+\frac{1}{2!}\theta\boldsymbol{a}^{\wedge}+\frac{1}{3!}\theta^{2}{(\boldsymbol{a}^{\wedge})}^{2}+\frac{1}{4!}\theta^{3}{(\boldsymbol{a}^{\wedge})}^{3}+\frac{1}{5!}\theta^{4}{(\boldsymbol{a}^{\wedge})}^{4}\cdots \\ &=\frac{1}{\theta}\left(\frac{1}{2!}\theta^{2}-\frac{1}{4!}\theta^{4}+\cdots\right)(\boldsymbol{a}^{\wedge})+\frac{1}{\theta}\left(\frac{1}{3!}\theta^{3}-\frac{1}{5}\theta^{5}+\cdots\right)(\boldsymbol{a}^{\wedge})^{2}+\boldsymbol{I} \\ &=\frac1\theta\left(1-\cos\theta\right)\left(\boldsymbol{a}^{\wedge}\right)+\frac{\theta-\sin\theta}\theta\left(\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I}\right)+\boldsymbol{I} \\ &=\frac{\sin\theta}\theta\boldsymbol{I}+\left(1-\frac{\sin\theta}\theta\right)\boldsymbol{aa}^\mathrm{T}+\frac{1-\cos\theta}\theta\boldsymbol{a}^\mathrm{\wedge}\overset{\mathrm{def}}{\operatorname*{=}}\boldsymbol{J}. \end{aligned} \]
\[ \boldsymbol{J}=\frac{\sin\theta}{\theta}\boldsymbol{I}+\left(1-\frac{\sin\theta}{\theta}\right)\boldsymbol{a}\boldsymbol{a}^\mathrm{T}+\frac{1-\cos\theta}{\theta}\boldsymbol{a}^\mathrm{\wedge}. \]
4.28 没看懂
4.3 李代数求导与扰动模型4.3.1 BCH 公式与近似形式探究如下式子是否成立 :
\[ \ln\left(\exp\left(A\right)\exp\left(B\right)\right)=A+B ? \]
但它并不成立。两个李代数指数映射乘积的完整形式,由 Baker-Campbell-Hausdorff :
\[ \ln\left(\exp\left(A\right)\exp\left(B\right)\right)=A+B+\frac{1}{2}\left[A,B\right]+\frac{1}{12}\left[A,\left[A,B\right]\right]-\frac{1}{12}\left[B,\left[A,B\right]\right]+\cdots \]
特别的,当 \(\displaystyle \phi_{1}\) \(\displaystyle \phi_{2}\) :
\[ \ln\left(\exp\left(\phi_1^\wedge\right)\exp\left(\phi_2^\wedge\right)\right)^\vee\approx\begin{cases}J_l(\phi_2)^{-1}\phi_1+\phi_2&\text{当}\phi_1\text{为小量},\\J_r(\phi_1)^{-1}\phi_2+\phi_1&\text{当}\phi_2\text{为小量}.\end{cases} \]
\[ \boldsymbol{J}_{l}=\frac{\sin\theta}{\theta}\boldsymbol{I}+\left(1-\frac{\sin\theta}{\theta}\right)\boldsymbol{a}\boldsymbol{a}^\mathrm{T}+\frac{1-\cos\theta}{\theta}\boldsymbol{a}^\mathrm{\wedge}. \]
\[ \boldsymbol{J}_{\ell}^{-1}=\frac{\theta}{2}\cot\frac{\theta}{2}\boldsymbol{I}+\left(1-\frac{\theta}{2}\cot\frac{\theta}{2}\right)\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\frac{\theta}{2}\boldsymbol{a}^{\wedge}. \]
\[ J_{r}(\phi)=J_{l}(-\phi). \]
于是我们就可以谈论李群乘法与李代数加法的关系了。\(\displaystyle \boldsymbol{R}\) 对应 \(\displaystyle \phi\) ,我们给它左乘一个微小旋转,记作 \(\displaystyle \Delta \boldsymbol{R}\)
\[ \exp\left(\Delta\phi^{\wedge}\right)\exp\left(\phi^{\wedge}\right)=\exp\left(\left(\phi+J_{l}^{-1}\left(\phi\right)\Delta\phi\right)^{\wedge}\right). \]
\[ \exp\left(\left(\phi+\Delta\phi\right)^{\wedge}\right)=\exp\left(\left(J_{l}\Delta\phi\right)^{\wedge}\right)\exp\left(\phi^{\wedge}\right)=\exp\left(\phi^{\wedge}\right)\exp\left(\left(J_{r}\Delta\phi\right)^{\wedge}\right). \]
对于 SE (3) :
\[ \exp\left(\Delta\xi^{\wedge}\right)\exp\left(\xi^{\wedge}\right)\approx\exp\left(\left(\mathcal{J}_{l}^{-1}\Delta\xi+\xi\right)^{\wedge}\right) \]
\[ exp\left(\xi^{\wedge}\right)\exp\left(\Delta\xi^{\wedge}\right)\approx\exp\left(\left(\mathcal{J}_{r}^{-1}\Delta\xi+\xi\right)^{\wedge}\right). \]
唯一不同的是这里的 \(\displaystyle J_{l}\)
4.3.2 SO (3) 上的李代数求导\[ z=T\boldsymbol{p}+\boldsymbol{w}. \]
其中 \(\displaystyle \boldsymbol{w}\)
\[ e=z-Tp. \]
假设一共有 N :
\[ \min_{\boldsymbol{T}}J(\boldsymbol{T})=\sum_{i=1}^N\left\|\boldsymbol{z}_i-\boldsymbol{T}\boldsymbol{p}_i\right\|_2^2. \]
most importantly,我们会构建与位姿有关的函数,并讨论该函数关于位姿的导数,以调整当前的估计值。
用李代数表示姿态,然后根据李代数加法对李代数求导。 对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。 4.4 李代数求导要计算 \(\displaystyle \frac{\partial\left(Rp\right)}{\partial R}\) , SO : \(\displaystyle \frac{\partial\left(\exp\left(\phi^{\wedge}\right)\boldsymbol{p}\right)}{\partial\boldsymbol{\phi}}.\)
\[ \begin{aligned} \frac{\partial\left(\exp\left(\phi^{\wedge}\right)\boldsymbol{p}\right)}{\partial\phi}& =\lim_{\delta\boldsymbol{\phi}\to0}\frac{\exp\left(\left(\boldsymbol{\phi}+\delta\boldsymbol{\phi}\right)^{\wedge}\right)\boldsymbol{p}-\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p}}{\delta\boldsymbol{\phi}} \\ &=\lim_{\delta\phi\to0}\frac{\exp\left(\left(\boldsymbol{J}_i\delta\boldsymbol{\phi}\right)^\wedge\right)\exp\left(\boldsymbol{\phi}^\wedge\right)\boldsymbol{p}-\exp\left(\boldsymbol{\phi}^\wedge\right)\boldsymbol{p}}{\delta\boldsymbol{\phi}} \\ &=\lim_{\delta\phi\to0}\frac{\left(\boldsymbol{I}+\left(\boldsymbol{J}_{l}\delta\boldsymbol{\phi}\right)^{\wedge}\right)\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p}-\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p}}{\delta\phi} \\ &=\lim_{\delta\phi\to0}\frac{\left(\boldsymbol{J}_{l}\delta\phi\right)^{\wedge}\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p}}{\delta\phi} \\ &=\lim_{\delta\boldsymbol{\phi}\to0}\frac{-(\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p})^{\wedge}\boldsymbol{J}_{l}\delta\boldsymbol{\phi}}{\delta\boldsymbol{\phi}}=-(\boldsymbol{R}\boldsymbol{p})^{\wedge}\boldsymbol{J}_{l}. \end{aligned} \]
BCH 线性近似 + :
\[ \frac{\partial\left(\boldsymbol{Rp}\right)}{\partial\boldsymbol{\phi}}=\left(-\boldsymbol{Rp}\right)^{\wedge}\boldsymbol{J}_{l}. \]
但是这里仍然有 \(\displaystyle \boldsymbol{J}_{l}\)
4.4.1 扰动模型(左乘)\(\displaystyle \varphi\) \(\displaystyle \Delta \boldsymbol{R}\)
\[ \begin{aligned} \frac{\partial\left(Rp\right)}{\partial\varphi}& =\lim_{\varphi\to0}\frac{\exp\left(\varphi^{\wedge}\right)\exp\left(\phi^{\wedge}\right)p-\exp\left(\phi^{\wedge}\right)p}{\varphi} \\ &=\lim_{\varphi\to0}\frac{(\boldsymbol{I}+\boldsymbol{\varphi}^{\wedge})\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p}-\exp\left(\boldsymbol{\phi}^{\wedge}\right)\boldsymbol{p}}{\varphi} \\ &=\lim_{\varphi\to0}\frac{\varphi^\wedge Rp}\varphi=\lim_{\varphi\to0}\frac{-\left(Rp\right)^\wedge\varphi}\varphi=-\left(Rp\right)^\wedge. \end{aligned} \]
4.4.2 SE (3) 上的李代数求导\[ \begin{aligned} \frac{\partial\left(\boldsymbol{T}\boldsymbol{p}\right)}{\partial\delta\boldsymbol{\xi}}&=\lim_{\delta\boldsymbol{\xi}\to\boldsymbol{0}}\frac{\exp\left(\delta\boldsymbol{\xi}^{\wedge}\right)\exp\left(\boldsymbol{\xi}^{\wedge}\right)\boldsymbol{p}-\exp\left(\boldsymbol{\xi}^{\wedge}\right)\boldsymbol{p}}{\delta\xi} \\ &=\lim_{\delta\boldsymbol{\xi}\to\mathbf{0}}\frac{\left(\boldsymbol{I}+\delta\boldsymbol{\xi}^{\wedge}\right)\exp\left(\boldsymbol{\xi}^{\wedge}\right)\boldsymbol{p}-\exp\left(\boldsymbol{\xi}^{\wedge}\right)\boldsymbol{p}}{\delta\boldsymbol{\xi}} \\ &=\lim_{\delta\boldsymbol{\xi}\to0}\frac{\delta\boldsymbol{\xi}^{\wedge}\exp\left(\boldsymbol{\xi}^{\wedge}\right)\boldsymbol{p}}{\delta\boldsymbol{\xi}} \\ &=\lim_{\delta\boldsymbol{\xi}\to\mathbf{0}}\frac{\begin{bmatrix}\delta\boldsymbol{\phi}^\wedge&\delta\boldsymbol{\rho}\\\\\mathbf{0}^\mathrm{T}&0\end{bmatrix}\begin{bmatrix}\boldsymbol{R}\boldsymbol{p}+\boldsymbol{t}\\\\1\end{bmatrix}}{\delta\boldsymbol{\xi}} \\ &=\lim_{\delta\boldsymbol{\xi}\to\boldsymbol{0}}\frac{\begin{bmatrix}\delta\boldsymbol{\phi}^{\wedge}\left(\boldsymbol{R}\boldsymbol{p}+\boldsymbol{t}\right)+\delta\boldsymbol{\rho}\\\boldsymbol{0}^{\mathrm{T}}\end{bmatrix}}{[\delta\boldsymbol{\rho},\delta\boldsymbol{\phi}]^{\mathrm{T}}}=\begin{bmatrix}\boldsymbol{I}&-(\boldsymbol{R}\boldsymbol{p}+\boldsymbol{t})^{\wedge}\\\boldsymbol{0}^{\mathrm{T}}&\boldsymbol{0}^{\mathrm{T}}\end{bmatrix}\stackrel{\mathrm{def}}{=}(\boldsymbol{T}\boldsymbol{p})^{\odot}. \end{aligned} \]
\[ \frac{\mathrm{d}\begin{bmatrix}a\\b\end{bmatrix}}{\mathrm{d}\begin{bmatrix}x\\y\end{bmatrix}}=\left(\frac{\mathrm{d}[a,b]^\mathrm{T}}{\mathrm{d}\begin{bmatrix}x\\y\end{bmatrix}}\right)^\mathrm{T}=\begin{bmatrix}\frac{\mathrm{d}a}{\mathrm{d}x}&\frac{\mathrm{d}b}{\mathrm{d}x}\\\frac{\mathrm{d}a}{\mathrm{d}y}&\frac{\mathrm{d}b}{\mathrm{d}y}\end{bmatrix}^\mathrm{T}=\begin{bmatrix}\frac{\mathrm{d}a}{\mathrm{d}x}&\frac{\mathrm{d}a}{\mathrm{d}y}\\\frac{\mathrm{d}b}{\mathrm{d}x}&\frac{\mathrm{d}b}{\mathrm{d}y}\end{bmatrix} \]
4.5 实践 :Sophus4.5.1 Sophus 的基本使用方法4.5.2 例子 : 绝对轨迹误差(Absolute Trajectory Error, ATE) \[ \mathrm{ATE}_{\mathrm{all}}=\sqrt{\frac{1}{N}\sum_{i=1}^{N}\|\log(T_{\mathrm{gt},i}^{-1}T_{\mathrm{esti},i})^{\vee}\|_{2}^{2}}, \]
即均方根误差(Root-Mean-Squared Error, RMSE)
绝对平移误差(Average Translational Error) \[ \mathrm{ATE}_{\mathrm{all}}=\sqrt{\frac{1}{N}\sum_{i=1}^{N}\|\log(T_{\mathrm{gt},i}^{-1}T_{\mathrm{esti},i})^{\vee}\|_{2}^{2}}, \]
相对位姿误差(Relative Pose Error, RPE) \[ \mathrm{RPE}_{\mathrm{all}}=\sqrt{\frac{1}{N-\Delta t}\sum_{i=1}^{N-\Delta t}\|\log\left(\left(\boldsymbol{T}_{\mathrm{gt},i}^{-1}\boldsymbol{T}_{\mathrm{gt},i+\Delta t}\right)\right)^{-1}\left(\boldsymbol{T}_{\mathrm{est},i}^{-1}\boldsymbol{T}_{\mathrm{est},i+\Delta t}\right))^{\vee}\|_{2}^{2}}, \]
\[ \mathrm{RPE}_{\mathrm{trans}}=\sqrt{\frac{1}{N-\Delta t}\sum_{i=1}^{N-\Delta t}\|\mathrm{trans}\left(\left(T_{gt,i}^{-1}T_{gt,i+\Delta t}\right)\right)^{-1}\left(T_{\mathrm{esti},i}^{-1}T_{\mathrm{esti},i+\Delta t}\right))\|_{2}^{2}}. \]
代码计算 :
4.6 相似变换与李代数在这里我们讨论 Sim (3) \(\displaystyle \mathfrak{sim}(3)\) \(\displaystyle \boldsymbol{p}\) ,在相机坐标系下要经过一个相似变换,而非欧氏变换:
\[ \boldsymbol{p}'=\begin{bmatrix}s\boldsymbol{R}&\boldsymbol{t}\\\boldsymbol{0}^\mathrm{T}&1\end{bmatrix}\boldsymbol{p}=s\boldsymbol{R}\boldsymbol{p}+\boldsymbol{t}. \]
\[ \mathrm{Sim}(3)=\left\{S=\begin{bmatrix}sR&t\\\\\mathbf{0}^\mathrm{T}&1\end{bmatrix}\in\mathbb{R}^{4\times4}\right\}. \]
\[ \sin(3)=\left\{\zeta|\zeta=\begin{bmatrix}\rho\\\\\phi\\\\\sigma\end{bmatrix}\in\mathbb{R}^7,\zeta^\wedge=\begin{bmatrix}\sigma\boldsymbol{I}+\phi^\wedge&\rho\\\\\mathbf{0}^\mathrm{T}&0\end{bmatrix}\in\mathbb{R}^{4\times4}\right\}. \]
\[ \exp\left(\zeta^{\wedge}\right)=\begin{bmatrix}\mathrm{e}^{\sigma}\exp\left(\phi^{\wedge}\right)&J_{s}\rho\\0^{\mathrm{T}}&1\end{bmatrix}. \]
其中,\(\displaystyle \boldsymbol{J}_{S}\) :
\[ \begin{aligned} \text{J}& =\frac{\mathrm{e}^{\sigma}-1}{\sigma}I+\frac{\sigma\mathrm{e}^{\sigma}\sin\theta+\left(1-\mathrm{e}^{\sigma}\cos\theta\right)\theta}{\sigma^{2}+\theta^{2}}\boldsymbol{a}^{\wedge} \\ &+\left(\frac{\mathrm{e}^\sigma-1}{\sigma}-\frac{\left(\mathrm{e}^\sigma\cos\theta-1\right)\sigma+\left(\mathrm{e}^\sigma\sin\theta\right)\theta}{\sigma^2+\theta^2}\right)\boldsymbol{a}^\wedge\boldsymbol{a}^\wedge. \end{aligned} \]
于是,李代数与李群的关系 :
\[ s=\mathrm{e}^\sigma, R=\exp(\phi^\wedge), t=J_s\rho. \]
\[ \frac{\partial\boldsymbol{Sp}}{\partial\boldsymbol{\zeta}}=\begin{bmatrix}\boldsymbol{I}&-\boldsymbol{q}^\wedge&\boldsymbol{q}\\\boldsymbol{0}^\mathrm{T}&\boldsymbol{0}^\mathrm{T}&0\end{bmatrix}. \]
4.7 习题TODO
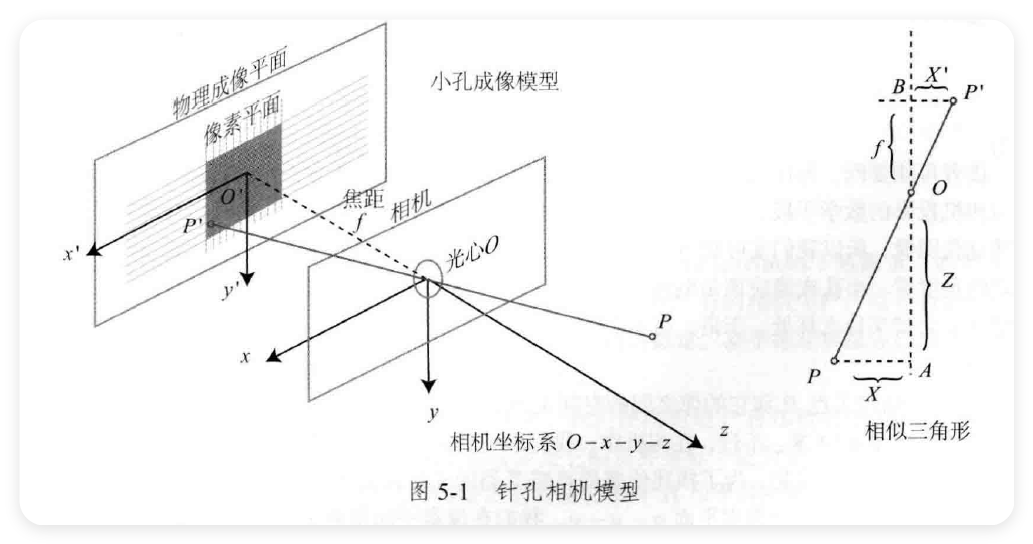
5 相机与图像5.1 相机模型 针孔模型 透镜会产生畸变 内参数(Intrinsics) 5.1.1 针孔相机模型
\[ \frac{Z}{f}=-\frac{X}{X'}=-\frac{Y}{Y'}. \]
去掉负号 :
\[ \frac Zf=\frac X{X^{\prime}}=\frac Y{Y^{\prime}}. \]
\[ \begin{aligned}X'&=f\frac{X}{Z}\\Y'&=f\frac{Y}{Z}\end{aligned}. \]
还有一个像素坐标系,u 轴与 x v 轴与 y :
\[ \begin{cases}u=\alpha X'+c_x\\[2ex]v=\beta Y'+c_y\end{cases}. \]
\[ \begin{cases}u=f_x\frac{X}{Z}+c_x\\\\v=f_y\frac{Y}{Z}+c_y\end{cases}. \]
\[ Z\begin{pmatrix}u\\\\v\\\\1\end{pmatrix}=\begin{pmatrix}f_x&0&c_x\\0&f_y&c_y\\\\0&0&1\end{pmatrix}\begin{pmatrix}X\\\\Y\\\\Z\end{pmatrix}\overset{\text{def}}{=}\boldsymbol{KP}. \]
最中间的矩阵称为相机的内参数(Camera Inrinsics)矩阵 \(\displaystyle \boldsymbol{K}\)
\[ Z\boldsymbol{P}_{uv}=Z\begin{bmatrix}u\\\\v\\\\1\end{bmatrix}=\boldsymbol{K}\left(\boldsymbol{R}\boldsymbol{P}_\mathrm{w}+\boldsymbol{t}\right)=\boldsymbol{K}\boldsymbol{T}\boldsymbol{P}_\mathrm{w}. \]
其中 \(\displaystyle \boldsymbol{R},\boldsymbol{t}\)
\[ (\boldsymbol{RP_\mathrm{w}}+\boldsymbol{t})=\underbrace{[X,Y,Z]^\mathrm{T}}_{\text{相机坐标}}\to\underbrace{[X/Z,Y/Z,1]^\mathrm{T}}_{\text{归一化坐标}} . \]
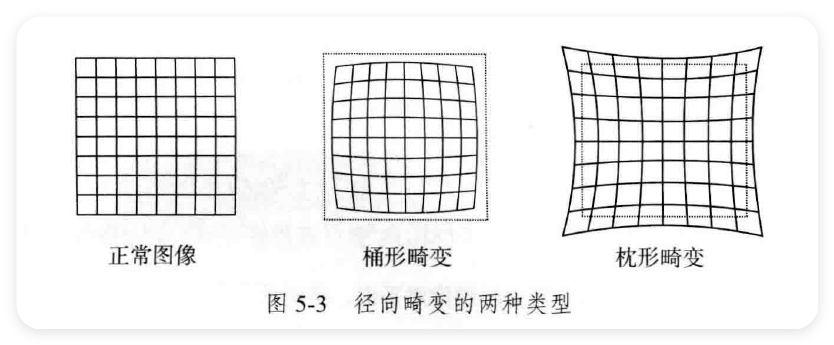
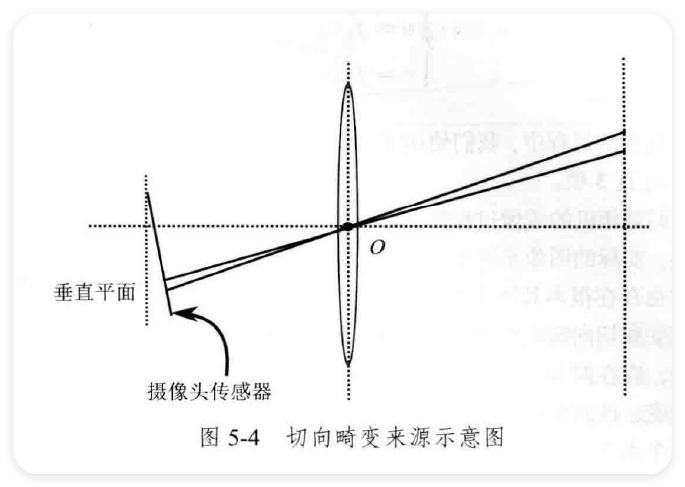
5.1.2 畸变模型 畸变 (Distortion ) 筒形畸变 枕形畸变 径向畸变即 \(\displaystyle r\) 切向畸变即 \(\displaystyle \theta\) \[ \begin{align} x_{\mathrm{distorted}}&=x(1+k_1r^2+k_2r^4+k_3r^6) \\ y_{\mathrm{distorted}}&=y(1+k_1r^2+k_2r^4+k_3r^6). \end{align} \]
\[ \begin{align} x_{\mathrm{distorted}}&=x+2p_1xy+p_2(r^2+2x^2) \\ y_{\mathrm{distorted}}&=y+p_1(r^2+2y^2)+2p_2xy \end{align} \]
所以我们可以找到一个点在像素平面上的正确位置 :
将三维空间点投影到归一化图像平面。设它的归一化坐标为 \(\displaystyle [x, y]^\mathrm{T}\) 对归一化平面上的点计算径向畸变和切向畸变 \[ \begin{cases}x_\text{distorted}=x(1+k_1r^2+k_2r^4+k_3r^6)+2p_1xy+p_2(r^2+2x^2)\\y_\text{distorted}=y(1+k_1r^2+k_2r^4+k_3r^6)+p_1(r^2+2y^2)+2p_2xy\end{cases} \]
将畸变后的点通过内参数矩阵投影到像素平面,得到该点在图像上的正确位置。 \[ \begin{cases}u=f_xx_\text{distorted}+c_x\\\\v=f_yy_\text{distorted}+c_y\end{cases}. \]
还有很多的相机模型比如 :
总结一下单目相机的成像过程 :
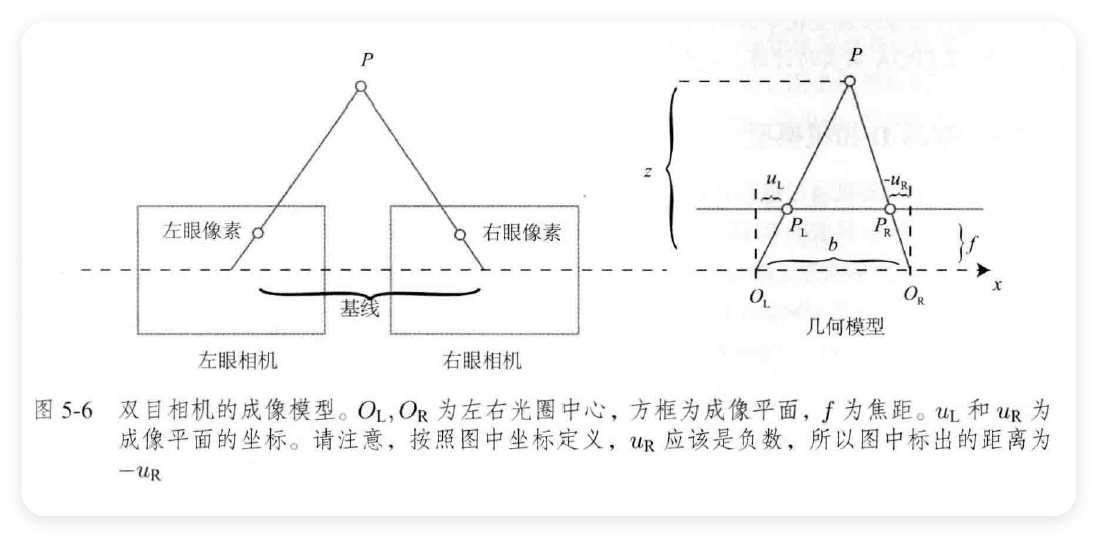
世界坐标系下有一个固定的点 \(\displaystyle P\) \(\displaystyle \boldsymbol{P}_{w}\) 由于相机在运动,它的运动由 \(\displaystyle \boldsymbol{R},\boldsymbol{t}\) \(\displaystyle \boldsymbol{T}\in SE(3)\) \(\displaystyle P\) \(\displaystyle \tilde{P_{c}} = \boldsymbol{R}\boldsymbol{P}_{w}+\boldsymbol{t}\) 这时的 \(\displaystyle \tilde{\boldsymbol{P}_{c}}\) \(\displaystyle X,Y,Z\) \(\displaystyle Z = 1\) \(\displaystyle P\) : \(\displaystyle \boldsymbol{P}_{c} = \left[ \frac{X}{Z}, \frac{Y}{Z}, 1 \right]^\mathrm{T}\) 有畸变时,根据畸变参数计算 \(\displaystyle \boldsymbol{P}_{c}\) \(\displaystyle P\) : \(\displaystyle \boldsymbol{P}_{uv} = \boldsymbol{K} \boldsymbol{P}_{c}\) 5.1.3 双目相机模型
\[ z=\frac{fb}{d},\quad d\stackrel{\mathrm{def}}{=}u_{\mathrm{L}}-u_{\mathrm{R}}. \]
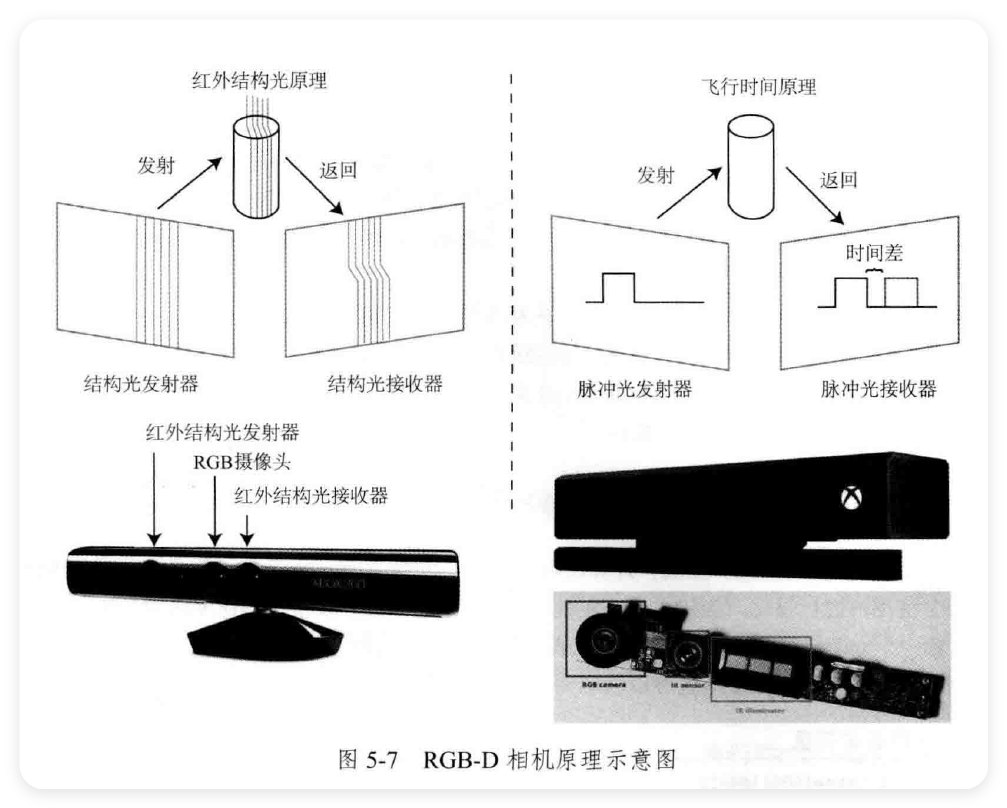
d 定义为左右图的横坐标之差,称为视差。 由于视差最小为一个像素,所以双目的深度存在一个理论上的最大值。 5.1.4 RGB-D 相机模型 红外结构光(Structured lightning) 飞行时间(Time-of-Flight, ToF) ToF 相机可以获得整个图像的像素深度输出彩色图和深度图,生成点云(Point Cloud) 5.2 图像\[ I(x,y):\mathbb{R}^2\mapsto\mathbb{R}. \]
5.3 实践 : 5.3.1 OpenCV 的基本使用方法TODO
5.3.2 图像去畸变TODO
5.4 实践 : 3 D 5.4.1 双目视觉TODO
5.4.2 RGB-D 视觉5.5 习题6 非线性优化前面我们已经搞清楚了运动方程和观测方程的来源,现在我们开始讨论噪声。
6.1 状态估计问题6.1.1 批量状态估计与最大后验估计\[ \begin{cases}\boldsymbol{x}_k=f\left(\boldsymbol{x}_{k-1},\boldsymbol{u}_k\right)+\boldsymbol{w}_k\\\boldsymbol{z}_{k,j}=h\left(\boldsymbol{y}_j,\boldsymbol{x}_k\right)+\boldsymbol{v}_{k,j}\end{cases}. \]
\[ s\boldsymbol{z}_{k,j}=\boldsymbol{K}(R_k\boldsymbol{y}_j+\boldsymbol{t}_k). \]
其中 \(\displaystyle s\)
\[ \boldsymbol{w}_k\sim\mathcal{N}\left(\boldsymbol{0},\boldsymbol{R}_k\right),\boldsymbol{v}_k\sim\mathcal{N}\left(\boldsymbol{0},\boldsymbol{Q}_{k,j}\right). \]
有两种方法来解决状态估计问题 :
用新的数据来更新当前时刻的估计状态,增量 / (incremental) 也可以把数据都攒起来,称为批量 (batch) \[ \boldsymbol{x}=\{\boldsymbol{x}_1,\ldots,\boldsymbol{x}_N\},\quad\boldsymbol{y}=\{\boldsymbol{y}_1,\ldots,\boldsymbol{y}_M\}. \]
\[ P(\boldsymbol{x},\boldsymbol{y}|z,\boldsymbol{u}). \]
\[ P\left(\boldsymbol{x},\boldsymbol{y}|\boldsymbol{z},\boldsymbol{u}\right)=\frac{P\left(\boldsymbol{z},\boldsymbol{u}|\boldsymbol{x},\boldsymbol{y}\right)P\left(\boldsymbol{x},\boldsymbol{y}\right)}{P\left(\boldsymbol{z},\boldsymbol{u}\right)}\propto\underbrace{P\left(\boldsymbol{z},\boldsymbol{u}|\boldsymbol{x},\boldsymbol{y}\right)}_{\text{似然}}\underbrace{P\left(\boldsymbol{x},\boldsymbol{y}\right)}_{\text{先验}}. \]
可以先求一个状态最优估计 :
\[ (\boldsymbol{x},\boldsymbol{y})^*_{\mathrm{MAP}}=\arg\max P(\boldsymbol{x},\boldsymbol{y}|\boldsymbol{z},\boldsymbol{u})=\arg\max P(\boldsymbol{z},\boldsymbol{u}|\boldsymbol{x},\boldsymbol{y})P(\boldsymbol{x},\boldsymbol{y}). \]
求解最大后验概率等价于最大化似然和先验的乘积。
\[ (\boldsymbol{x},\boldsymbol{y})^*{}_{\mathrm{MLE}}=\arg\max P(\boldsymbol{z},\boldsymbol{u}|\boldsymbol{x},\boldsymbol{y}). \]
最大似然估计 :
6.1.2 最小二乘的引出对于某一次观测 :
\[ z_{k,j}=h\left(y_{j},x_{k}\right)+v_{k,j}, \]
\[ P(\boldsymbol{z}_{j,k}|\boldsymbol{x}_k,\boldsymbol{y}_j)=N\left(h(\boldsymbol{y}_j,\boldsymbol{x}_k),\boldsymbol{Q}_{k,j}\right). \]
可以使用最小化负对数来求一个高斯分布的最大似然。
\[ P\left(\boldsymbol{x}\right)=\frac{1}{\sqrt{\left(2\pi\right)^{N}\det\left(\boldsymbol{\Sigma}\right)}}\exp\left(-\frac{1}{2}(\boldsymbol{x}-\boldsymbol{\mu})^{\mathrm{T}}\boldsymbol{\Sigma}^{-1}\left(\boldsymbol{x}-\boldsymbol{\mu}\right)\right). \]
\[ -\ln\left(P\left(\boldsymbol{x}\right)\right)=\frac12\ln\left(\left(2\pi\right)^N\det\left(\boldsymbol{\Sigma}\right)\right)+\frac12\left(\boldsymbol{x}-\boldsymbol{\mu}\right)^\mathrm{T}\boldsymbol{\Sigma}^{-1}\left(\boldsymbol{x}-\boldsymbol{\mu}\right). \]
\[ \begin{aligned} (x_{k},y_{j})^{*}& =\arg\max\mathcal{N}(h(\boldsymbol{y}_{j},\boldsymbol{x}_{k}),\boldsymbol{Q}_{k,j}) \\ &=\arg\min\left(\left(\boldsymbol{z}_{k,j}-h\left(\boldsymbol{x}_k,\boldsymbol{y}_j\right)\right)^\mathrm{T}\boldsymbol{Q}_{k,j}^{-1}\left(\boldsymbol{z}_{k,j}-h\left(\boldsymbol{x}_k,\boldsymbol{y}_j\right)\right)\right). \end{aligned} \]
该式等价于最小化噪声项的一个二次型,马哈拉诺比斯距离 (Mahalanobis distance) \(\displaystyle \boldsymbol{Q}_{k,j}^{-1}\)
\[ P\left(\boldsymbol{z},\boldsymbol{u}|\boldsymbol{x},\boldsymbol{y}\right)=\prod_kP\left(\boldsymbol{u}_k|\boldsymbol{x}_{k-1},\boldsymbol{x}_k\right)\prod_{k,j}P\left(\boldsymbol{z}_{k,j}|\boldsymbol{x}_k,\boldsymbol{y}_j\right), \]
\[ \begin{align} e_{u,k} &=\boldsymbol{x}_k-f\left(\boldsymbol{x}_{k-1},\boldsymbol{u}_k\right) \\ e_{z,j,k} &=\boldsymbol{z}_{k,j}-h\left(\boldsymbol{x}_k,\boldsymbol{y}_j\right), \end{align} \]
\[ \min J(\boldsymbol{x},\boldsymbol{y})=\sum_{k}\boldsymbol{e}_{\boldsymbol{u},k}^{\mathrm{T}}\boldsymbol{R}_{k}^{-1}\boldsymbol{e}_{\boldsymbol{u},k}+\sum_{k}\sum_{j}\boldsymbol{e}_{\boldsymbol{z},k,j}^{\mathrm{T}}\boldsymbol{Q}_{k,j}^{-1}\boldsymbol{e}_{\boldsymbol{z},k,j}. \]
这样就得到了一个最小二乘问题 (Least Square Problem)
整个问题有一种稀疏的形式。 用李代数表示增量会有无约束的优势。 用二次型度量误差,那么误差的分布会影响此项在整个问题中的权重。 6.1.3 例子 : 考虑一个非常简单的离散时间系统 :
\[ \begin{aligned}&x_{k}=x_{k-1}+u_{k}+w_{k},&&\boldsymbol{w}_{k}\sim\mathcal{N}\left(0,\boldsymbol{Q}_{k}\right)\\&\boldsymbol{z}_{k}=\boldsymbol{x}_{k}+\boldsymbol{n}_{k},&&\boldsymbol{n}_{k}\sim\mathcal{N}\left(0,\boldsymbol{R}_{k}\right)\end{aligned} \]
\[ \begin{gathered} x_{map}^{*} =\arg\max P(\boldsymbol{x}|\boldsymbol{u},\boldsymbol{z})=\arg\max P(\boldsymbol{u},\boldsymbol{z}|\boldsymbol{x}) \\ =\prod_{k=1}^3P(\boldsymbol{u}_k|\boldsymbol{x}_{k-1},\boldsymbol{x}_k)\prod_{k=1}^3P(\boldsymbol{z}_k|\boldsymbol{x}_k), \end{gathered} \]
而对于具体的每一项,我们有 :
\[ P(\boldsymbol{u}_k|\boldsymbol{x}_{k-1},\boldsymbol{x}_k)=\mathcal{N}(\boldsymbol{x}_k-\boldsymbol{x}_{k-1},\boldsymbol{Q}_k), \]
\[ P\left(\boldsymbol{z}_{k}|\boldsymbol{x}_{k}\right)=\mathcal{N}\left(\boldsymbol{x}_{k},\boldsymbol{R}_{k}\right). \]
于是,我们可以构建误差变量 :
\[ e_{\boldsymbol{u},k}=\boldsymbol{x}_k-\boldsymbol{x}_{k-1}-\boldsymbol{u}_k,\quad\boldsymbol{e}_{z,k}=\boldsymbol{z}_k-\boldsymbol{x}_k, \]
于是最小二乘的目标函数为 :
\[ \min\sum_{k=1}^{3}e_{u,k}^{\mathrm{T}}Q_{k}^{-1}e_{u,k}+\sum_{k=1}^{3}e_{z,k}^{\mathrm{T}}R_{k}^{-1}e_{z,k}. \]
定义向量 \(\displaystyle \boldsymbol{y} = [\boldsymbol{u},\boldsymbol{z}]^\mathrm{T}\)
\[ y-Hx=e\sim\mathcal{N}(\mathbf{0},\boldsymbol{\Sigma}). \]
\[ H=\begin{bmatrix}1&-1&0&0\\0&1&-1&0\\0&0&1&-1\\\hline0&1&0&0\\0&0&1&0\\0&0&0&1\end{bmatrix}, \]
且 \(\displaystyle \Sigma = diag(\boldsymbol{Q_{1}},\boldsymbol{Q_{2}},\boldsymbol{Q_{3}},\boldsymbol{R_{1}},\boldsymbol{R_{2}},\boldsymbol{R_{3}})\)
\[ x_{\mathrm{map}}^*=\arg\min e^{\mathrm{T}}\Sigma^{-1}e, \]
它的唯一解是 :
\[ x_{\mathrm{map}}^{*}=(H^{\mathrm{T}}\Sigma^{-1}H)^{-1}H^{\mathrm{T}}\Sigma^{-1}y. \]
6.2 非线性最小二乘先考虑一个简单的最小二乘问题 :
\[ \min_{x}F(x)=\frac12\|f\left(x\right)\|_{2}^{2}.` \]
对于不方便直接求解的最小二乘问题,我们可以用迭代的方式,从一个初始值出发,不断地更新当前的优化变量,使目标函数下降 :
给定某个初始值 \(\displaystyle \boldsymbol{x_{0}}\) 对于第 \(\displaystyle k\) \(\displaystyle \Delta x_{k}\) \(\displaystyle \left\|f\left(\boldsymbol{x}_{k}+\Delta\boldsymbol{x}_{k}\right)\right\|_{2}^{2}\) 若 \(\displaystyle \Delta x_k\) 否则,令 \(\displaystyle x_{k+1} = x_{k} + \Delta x_{k}\) \(\displaystyle \Delta x_{k}\) 下面是一些广泛使用的结果。
6.2.1 一阶和二阶梯度法使用泰勒展开 :
\[ F(\boldsymbol{x}_k+\Delta\boldsymbol{x}_k)\approx F(\boldsymbol{x}_k)+\boldsymbol{J}\left(\boldsymbol{x}_k\right)^\mathrm{T}\Delta\boldsymbol{x}_k+\frac{1}{2}\Delta\boldsymbol{x}_k^\mathrm{T}\boldsymbol{H}(\boldsymbol{x}_k)\Delta\boldsymbol{x}_k. \]
其中 \(\displaystyle \boldsymbol{J}(x_{k})\) \(\displaystyle F(x)\) \(\displaystyle x\) ) ,\(\displaystyle \boldsymbol{H}\) ) 。
\[ \Delta\boldsymbol{x}^*=-\boldsymbol{J}(\boldsymbol{x}_k). \]
\[ \Delta\boldsymbol{x}^*=\arg\min\left(F\left(\boldsymbol{x}\right)+\boldsymbol{J}\left(\boldsymbol{x}\right)^\mathrm{T}\Delta\boldsymbol{x}+\frac{1}{2}\Delta\boldsymbol{x}^\mathrm{T}\boldsymbol{H}\Delta\boldsymbol{x}\right). \]
对 \(\displaystyle \Delta x\) :
\[ J+H\Delta x=\mathbf{0}\Rightarrow H\Delta x=-J. \]
这个方法又叫牛顿法。
6.2.2 高斯牛顿法换一个函数展开 :
\[ f\left(x+\Delta x\right)\approx f\left(x\right)+\boldsymbol{J}\left(\boldsymbol{x}\right)^{\mathrm{T}}\Delta\boldsymbol{x}. \]
\[ \Delta x^{*}=\arg\min_{\Delta x}\frac{1}{2}\Big\|f\left(\boldsymbol{x}\right)+\boldsymbol{J}\left(\boldsymbol{x}\right)^{\mathrm{T}}\Delta\boldsymbol{x}\Big\|^{2}. \]
\[ \begin{aligned} \frac12\left\|f\left(\boldsymbol{x}\right)+\boldsymbol{J}\left(\boldsymbol{x}\right)^\mathrm{T}\Delta\boldsymbol{x}\right\|^2& =\frac12\Big(f\left(\boldsymbol{x}\right)+\boldsymbol{J}\left(\boldsymbol{x}\right)^\mathrm{T}\Delta\boldsymbol{x}\Big)^\mathrm{T}\Big(f\left(\boldsymbol{x}\right)+\boldsymbol{J}\left(\boldsymbol{x}\right)^\mathrm{T}\Delta\boldsymbol{x}\Big) \\ &=\frac12\left(\|f(\boldsymbol{x})\|_2^2+2f\left(\boldsymbol{x}\right)\boldsymbol{J}(\boldsymbol{x})^\intercal\Delta\boldsymbol{x}+\Delta\boldsymbol{x}^\intercal\boldsymbol{J}(\boldsymbol{x})\boldsymbol{J}(\boldsymbol{x})^\intercal\Delta\boldsymbol{x}\right). \end{aligned} \]
\[ \boldsymbol{J}(\boldsymbol{x})f\left(\boldsymbol{x}\right)+\boldsymbol{J}(\boldsymbol{x})\boldsymbol{J}^\mathrm{T}\left(\boldsymbol{x}\right)\Delta\boldsymbol{x}=\boldsymbol{0}. \]
\[ \underbrace{\boldsymbol{J}(\boldsymbol{x})\boldsymbol{J}^{\intercal}}_{\boldsymbol{H}(\boldsymbol{x})}\left(\boldsymbol{x}\right)\Delta\boldsymbol{x}=\underbrace{-\boldsymbol{J}(\boldsymbol{x})f\left(\boldsymbol{x}\right)}_{\boldsymbol{g}(\boldsymbol{x})}. \]
增量方程 or Gauss-Newton equation or Normal equation
\[ H\Delta x=g. \]
求解增量方程是整个优化问题的核心所在
给定初始值 \(\displaystyle \boldsymbol{x}_{0}\) 对于第 \(\displaystyle k\) \(\displaystyle \boldsymbol{J}(x)\) \(\displaystyle f(\boldsymbol{x}_{k})\) 求解增量方程 : \(\displaystyle \boldsymbol{H} \Delta x_{k} = \boldsymbol{g}\) 若 \(\displaystyle \Delta x_{k}\) \(\displaystyle x_{k+1} = x_{k}+ \Delta x_{k}\) 2 6.2.3 列文伯格——马夸尔特方法Damped Newton Method
\[ \rho=\frac{f\left(\boldsymbol{x}+\Delta\boldsymbol{x}\right)-f\left(\boldsymbol{x}\right)}{\boldsymbol{J}\left(\boldsymbol{x}\right)^{\intercal}\Delta\boldsymbol{x}}. \]
框架 :
给定初始值 \(\displaystyle \boldsymbol{x}_{0}\) \(\displaystyle \mu\) 对于第 \(\displaystyle k\) : \(\displaystyle \min_{\Delta\boldsymbol{x}_{k}}\frac{1}{2}\Big\|f\left(\boldsymbol{x}_{k}\right)+\boldsymbol{J}\left(\boldsymbol{x}_{k}\right)^{\mathrm{T}}\Delta\boldsymbol{x}_{k}\Big\|^{2},\quad\mathrm{s.t.}\quad\left\|\boldsymbol{D}\Delta\boldsymbol{x}_{k}\right\|^{2}\leqslant\mu,\) 计算 \(\displaystyle \rho\) 对于 \(\displaystyle \frac{1}{4} \frac{3}{4}\) 判断阈值,循环 这是带不等式约束的优化问题 :
\[ \mathcal{L}(\Delta\boldsymbol{x}_{k},\lambda)=\frac{1}{2}\left\|f\left(\boldsymbol{x}_{k}\right)+\boldsymbol{J}\left(\boldsymbol{x}_{k}\right)^{\mathrm{T}}\Delta\boldsymbol{x}_{k}\right\|^{2}+\frac{\lambda}{2}\left(\left\|\boldsymbol{D}\Delta\boldsymbol{x}_{k}\right\|^{2}-\mu\right). \]
\[ (H+\lambda D^\mathrm{T}D) \Delta x_k=g. \]
6.3 实践 : 6.3.1 手写高斯牛顿法TODO
6.3.2 使用 Ceres TODO
6.3.3 使用 g2o TODO
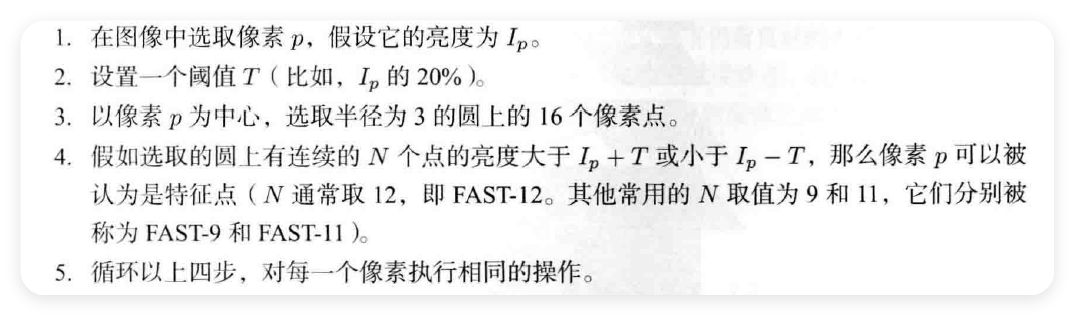
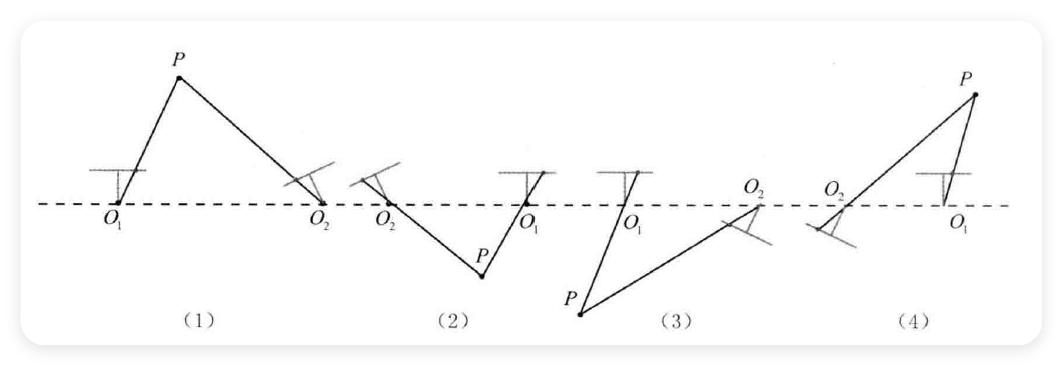
7 视觉里程计 17.1 特征点法7.1.1 特征点 如何根据图像估计相机运动 路标 : 特征点在相机运动之后保持稳定 人工设计的特征点 : Repeatability Distinctiveness Efficiency Locality 由两部分组成 : 关键点(Key-point) 描述子(Descriptor) SIFT ( 尺度不变特征变换,Scale-Invariant Feature Transform) ORB (Oriented FAST and Rotated BRIEF) 7.1.2 ORB 特征 FAST 角点提取 : ORB BRIEF BRIEF 描述子 : 定义图像的矩 : \(\displaystyle m_{pq} = \Sigma _{x,y \in B} x^p x^q I(x, y),p,q \in \{0, 1\}\) . 找到图像块的质心 : \(\displaystyle C=\left(\frac{m_{10}}{m_{00}},\frac{m_{01}}{m_{00}}\right).\) 得到一个几何中心到质心的方向向量 : \(\displaystyle \theta=\arctan(m_{01}/m_{10}).\) 7.1.3 特征匹配data association
通过测量描述子的距离来去最近的一个作为匹配点。描述子距离表示了两个特征之间的相似程度。 快速近似最近邻(FLANN) 7.2 实践 : 7.2.1 OpenCV 的 ORB TODO
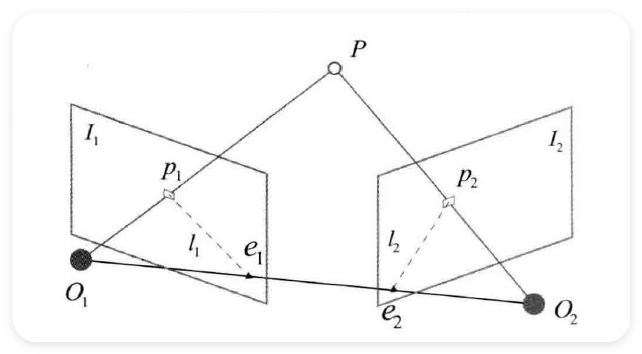
7.2.2 手写 ORB 7.2.3 计算相机运动 当相机为单目时,我们通过对极几何来解决两组 2 D 当相机为双目、RGB-D 时,通过 ICP 3 D 一个是 2 D 3 D PnP 7.3 D-2 D: 对极几何7.3.1 对极约束 Epipolar plane Epipoles Epipolar line \[ P=[X,Y,Z]^{\mathrm{T}}. \]
\[ s_{1}p_{1}=KP,\quad s_{2}p_{2}=K\left(RP+t\right). \]
成投影关系 : (equal up to scale)
\[ sp\simeq p. \]
\[ p_1\simeq KP,\quad p_2\simeq K\left(RP+t\right). \]
\[ x_1=K^{-1}p_1,\quad x_2=K^{-1}p_2. \]
\[ x_2\simeq Rx_1+t. \]
\[ t^{\wedge}x_{2}\simeq t^{\wedge}Rx_{1}. \]
\[ x_2^\mathrm{T}t^\wedge x_2\simeq x_2^\mathrm{T}t^\wedge Rx_1. \]
\[ x_2^\mathrm{T}t^\wedge Rx_1=0. \]
\[ p_2^\mathrm{T}K^{-\mathrm{T}}t^\wedge RK^{-1}p_1=0. \]
对极约束
\[ E=t^{\wedge}R,\quad F=K^{-\mathrm{T}}EK^{-1},\quad x_{2}^{\mathrm{T}}Ex_{1}=p_{2}^{\mathrm{T}}Fp_{1}=0. \]
根据配对点的像素位置求出 \(\displaystyle \boldsymbol{E}\) \(\displaystyle \boldsymbol{F}\) 根据 \(\displaystyle \boldsymbol{E}\) \(\displaystyle \boldsymbol{F}\) \(\displaystyle \boldsymbol{R},\boldsymbol{t}\) \(\displaystyle \boldsymbol{E}\) 和 \(\displaystyle \boldsymbol{F}\) 只相差了相机内参,所以实践中往往使用形式更简单的 \(\displaystyle \boldsymbol{E}\) 。 7.3.2 本质矩阵本质矩阵 : \(\displaystyle E=t^{\wedge}R\)
\(\displaystyle \boldsymbol{E}\) 可以证明,本质矩阵 \(\displaystyle \boldsymbol{E}\) \(\displaystyle [\sigma,\sigma,0]^\mathrm{T}\) \(\displaystyle \boldsymbol{E}\) 5 \(\displaystyle x_{1}=[u_{1},v_{1},1]^{\mathrm{T}},x_{2}=[u_{2},v_{2},1]^{\mathrm{T}}\) 。根据对极约束,有 \[ \begin{pmatrix}u_2,v_2,1\end{pmatrix}\begin{pmatrix}e_1&e_2&e_3\\\\e_4&e_5&e_6\\\\e_7&e_8&e_9\end{pmatrix}\begin{pmatrix}u_1\\\\v_1\\\\1\end{pmatrix}=0. \]
\[ \boldsymbol{e}=[e_1,e_2,e_3,e_4,e_5,e_6,e_7,e_8,e_9]^\mathrm{T}, \]
\[ [u_2u_1,u_2v_1,u_2,v_2u_1,v_2v_1,v_2,u_1,v_1,1]\cdot e=0. \]
我们把所有点都放到一个方程中,变成线性方程组 :
\[ \begin{pmatrix}u_2^1u_1^1&u_2^1v_1^1&u_2^1&v_2^1u_1^1&v_2^1v_1^1&v_2^1&u_1^1&v_1^1&1\\u_2^2u_1^2&u_2^2v_1^2&u_2^2&v_2^2u_1^2&v_2^2v_1^2&v_2^2&u_1^2&v_1^2&1\\\vdots&\vdots&\vdots&\vdots&\vdots&\vdots&\vdots&\vdots\\u_2^8u_1^8&u_2^8v_1^8&u_2^8&v_2^8u_1^8&v_2^8u_1^8&u_1^8&v_1^8&1\end{pmatrix}\begin{pmatrix}e_1\\e_2\\e_3\\e_4\\e_5\\e_6\\e_7\\e_8\\e_9\end{pmatrix}=0. \]
\[ E=U\Sigma V^{\mathrm{T}}, \]
\[ \begin{aligned}&t_{1}^{\wedge}=UR_{Z}(\frac{\pi}{2})\Sigma U^{\mathrm{T}},\quad R_{1}=UR_{Z}^{\mathrm{T}}(\frac{\pi}{2})V^{\mathrm{T}}\\&t_{2}^{\wedge}=UR_{Z}(-\frac{\pi}{2})\Sigma U^{\mathrm{T}},\quad R_{2}=UR_{Z}^{\mathrm{T}}(-\frac{\pi}{2})V^{\mathrm{T}}.\end{aligned} \]
\[ \boldsymbol{E}=\boldsymbol{U}\mathrm{diag}(\frac{\sigma_1+\sigma_2}2,\frac{\sigma_1+\sigma_2}2,0)\boldsymbol{V}^\mathrm{T}. \]
7.3.3 单应矩阵Homography
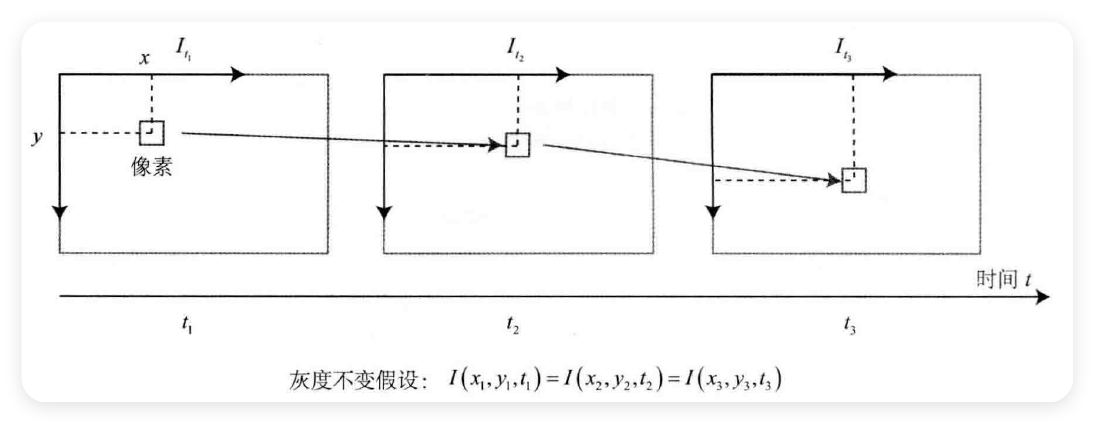
8 视觉里程计 28.1 直接法的引出 特征点法的缺点 关键点的提取与描述子的计算非常耗时 使用特征点时,会忽略除特征点以外的所有信息 相机有时会运动到特征缺失的地方 那么如何克服这些缺点 保留特征点,但只计算关键点,不计算描述子。使用光流法(Optical Flow)跟踪特征点的运动 只计算关键点,不计算描述子。使用直接法(Direct Method) 第一种方法仍然使用特征点,只是把匹配描述字替换成了光流跟踪,估计相机运动时仍然是哦那个对极几何、PnP 或 ICP 特征点法 : 直接法 : 只要场景中存在明暗变化就可以工作 8.2 D 光流 计算部分像素运动 : 计算所有像素运动 : Horn-SchunckLucas-Kanade 光流 灰度不变假设 : \[ I(x+\mathrm{d}x,y+\mathrm{d}y,t+\mathrm{d}t)=I(x,y,t). \]
\[ \boldsymbol{I}\left(x+\mathrm{d}x,y+\mathrm{d}y,t+\mathrm{d}t\right)\approx\boldsymbol{I}\left(x,y,t\right)+\frac{\partial\boldsymbol{I}}{\partial x}\mathrm{d}x+\frac{\partial\boldsymbol{I}}{\partial y}\mathrm{d}y+\frac{\partial\boldsymbol{I}}{\partial t}\mathrm{d}t. \]
\[ \frac{\partial\boldsymbol{I}}{\partial x}\frac{\mathrm{d}x}{\mathrm{d}t}+\frac{\partial\boldsymbol{I}}{\partial y}\frac{\mathrm{d}y}{\mathrm{d}t}=-\frac{\partial\boldsymbol{I}}{\partial t}. \]
\[ \begin{bmatrix}I_x&I_y\end{bmatrix}\begin{bmatrix}u\\\\v\end{bmatrix}=-I_t. \]
\[ \begin{bmatrix}I_x&I_y\end{bmatrix}_k\begin{bmatrix}u\\\\v\end{bmatrix}=-I_{tk},\quad k=1,\ldots,w^2. \]
\[ A\begin{bmatrix}u\\\\v\end{bmatrix}=-b. \]
\[ \begin{bmatrix}u\\\\v\end{bmatrix}^*=-\begin{pmatrix}\boldsymbol{A}^\mathrm{T}\boldsymbol{A}\end{pmatrix}^{-1}\boldsymbol{A}^\mathrm{T}\boldsymbol{b}. \]
8.3 实践 : LK 8.3.1 使用 LK C++ vector < Point2f > pt1 , pt2 ;
for ( auto & kp : kp1 ) pt1 . push_back ( kp . pt );
vector < uchar > status ;
vector < float > error ;
cv :: calcOpticalFlowPyrLK ( img1 , img2 , pt1 , pt2 , status , error );
8.3.2 用高斯牛顿法实现光流单层光流
\[ \min_{\Delta x,\Delta y}\left\|\boldsymbol{I}_1\left(x,y\right)-\boldsymbol{I}_2\left(x+\Delta x,y+\Delta y\right)\right\|_2^2. \]
多层光流 - 由粗至精(Coarse-to-fine)
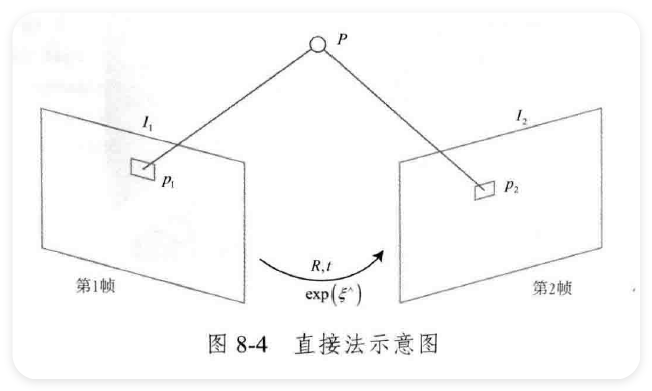
8.3.3 光流实践小结8.4 直接法8.4.1 直接法的推导
\[ \boldsymbol{p}_1=\begin{bmatrix}u\\\\v\\\\1\end{bmatrix}_1=\frac{1}{Z_1}\boldsymbol{K}\boldsymbol{P}, \]
\[ \boldsymbol{p}_{2}=\begin{bmatrix}u\\\\v\\\\1\end{bmatrix}_{2}=\frac{1}{Z_{2}}\boldsymbol{K}\left(\boldsymbol{R}\boldsymbol{P}+\boldsymbol{t}\right)=\frac{1}{Z_{2}}\boldsymbol{K}\left(\boldsymbol{T}\boldsymbol{P}\right)_{1:3}. \]
\[ e=\boldsymbol{I}_1\left(\boldsymbol{p}_1\right)-\boldsymbol{I}_2\left(\boldsymbol{p}_2\right). \]
\[ \min_{T}J\left(T\right)=\left\|e\right\|^{2}. \]
\[ \min_{\boldsymbol{T}}J\left(\boldsymbol{T}\right)=\sum_{i=1}^{N}e_{i}^{\mathrm{T}}e_{i},\quad e_{i}=\boldsymbol{I}_{1}\left(\boldsymbol{p}_{1,i}\right)-\boldsymbol{I}_{2}\left(\boldsymbol{p}_{2,i}\right). \]
\[ \begin{aligned}&q=TP,\\&\boldsymbol{u}=\frac{1}{Z_{2}}Kq.\end{aligned} \]
\[ e(T)=I_1(p_1)-I_2(u), \]
\[ \frac{\partial e}{\partial\boldsymbol{T}}=\frac{\partial\boldsymbol{I}_{2}}{\partial\boldsymbol{u}}\frac{\partial\boldsymbol{u}}{\partial\boldsymbol{q}}\frac{\partial\boldsymbol{q}}{\partial\delta\boldsymbol{\xi}}\delta\boldsymbol{\xi}, \]
\[ \frac{\partial\boldsymbol{u}}{\partial\boldsymbol{q}}=\begin{bmatrix}\frac{\partial u}{\partial X}&\frac{\partial u}{\partial Y}&\frac{\partial u}{\partial Z}\\\frac{\partial v}{\partial X}&\frac{\partial v}{\partial Y}&\frac{\partial v}{\partial Z}\end{bmatrix}=\begin{bmatrix}\frac{f_x}{Z}&0&-\frac{f_xX}{Z^2}\\0&\frac{f_y}{Z}&-\frac{f_yY}{Z^2}\end{bmatrix}. \]
\[ \frac{\partial\boldsymbol{q}}{\partial\delta\boldsymbol{\xi}}=\left[I,-\boldsymbol{q}^{\wedge}\right]. \]
\[ \frac{\partial\boldsymbol{u}}{\partial\delta\boldsymbol{\xi}}=\begin{bmatrix}\frac{f_x}{Z}&0&-\frac{f_xX}{Z^2}&-\frac{f_xXY}{Z^2}&f_x+\frac{f_xX^2}{Z^2}&-\frac{f_xY}{Z}\\0&\frac{f_y}{Z}&-\frac{f_yY}{Z^2}&-f_y-\frac{f_yY^2}{Z^2}&\frac{f_yXY}{Z^2}&\frac{f_yX}{Z}\end{bmatrix}. \]
\[ J=-\frac{\partial I_2}{\partial u}\frac{\partial u}{\partial\delta\xi}. \]
8.4.2 直接法的讨论8.5 实践 : 8.5.1 单层直接法8.5.2 多层直接法8.5.3 结果讨论8.5.4 直接法优缺点总结9 后端 19.1 概述9.1.1 状态估计的概率解释 只使用过去的信息 : 使用未来的信息更新 : \[ \begin{cases}\boldsymbol{x}_k=f\left(\boldsymbol{x}_{k-1},\boldsymbol{u}_k\right)+\boldsymbol{w}_k\\\boldsymbol{z}_{k,j}=h\left(\boldsymbol{y}_j,\boldsymbol{x}_k\right)+\boldsymbol{v}_{k,j}\end{cases}\quad k=1,\ldots,N, j=1,\ldots,M. \]
观测方程的数量会远远大于运动方程 当没有运动方程的时候,我们可以假设相机不动,或假设相机匀速运动 问题:当存在一些运动数据和观测数据时,我们如何估计状态量的高斯分布 误差时逐渐累积的 最大似然估计 : \[ x_k\stackrel{\mathrm{def}}{=}\{x_k,y_1,\ldots,y_m\}. \]
\[ \begin{cases}\boldsymbol{x}_k=f\left(\boldsymbol{x}_{k-1},\boldsymbol{u}_k\right)+\boldsymbol{w}_k\\\boldsymbol{z}_k=h\left(\boldsymbol{x}_k\right)+\boldsymbol{v}_k\end{cases}\quad k=1,\ldots,N. \]
\[ P\left(\boldsymbol{x}_k|\boldsymbol{x}_0,\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k}\right)\propto P\left(\boldsymbol{z}_k|\boldsymbol{x}_k\right)P\left(\boldsymbol{x}_k|\boldsymbol{x}_0,\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right). \]
\[ P\left(\boldsymbol{x}_{k}|\boldsymbol{x}_{0},\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right)=\int P\left(\boldsymbol{x}_{k}|\boldsymbol{x}_{k-1},\boldsymbol{x}_{0},\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right)P\left(\boldsymbol{x}_{k-1}|\boldsymbol{x}_{0},\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right)\mathrm{d}\boldsymbol{x}_{k-1}. \]
虽然可以继续对此式进行展开,但我们只关心 \(\displaystyle k\) \(\displaystyle k - 1\) 第一种方法是假设马尔可夫性 : \(\displaystyle k\) \(\displaystyle k - 1\) 那么我们就可以得到以扩展卡尔曼滤波(EKF)为代表的滤波器方式 第二种方法是依然考虑和之前所有状态的关系,姿势会得到非线性优化为主体的优化框架。 主流是非线性优化 9.1.2 线性系统和 KF\[ P\left(\boldsymbol{x}_k|\boldsymbol{x}_{k-1},\boldsymbol{x}_0,\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right)=P\left(\boldsymbol{x}_k|\boldsymbol{x}_{k-1},\boldsymbol{u}_k\right). \]
\[ P\left(\boldsymbol{x}_{k-1}|\boldsymbol{x}_0,\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right)=P\left(\boldsymbol{x}_{k-1}|\boldsymbol{x}_0,\boldsymbol{u}_{1:k-1},\boldsymbol{z}_{1:k-1}\right). \]
所以我们实际在做的事如何把 \(\displaystyle k - 1\) \(\displaystyle k\) 即我们只要维护一个状态,并不断地迭代更新 只要维护状态量的均值和协方差(状态量服从高斯分布) \[ \begin{cases}x_k=A_kx_{k-1}+u_k+w_k\\z_k=C_kx_k+v_k\end{cases}\quad k=1,\ldots,N. \]
\[ w_k\sim N(0,\boldsymbol{R}).\quad\boldsymbol{v}_k\sim N(\boldsymbol{0},\boldsymbol{Q}). \]
\[ P\left(\boldsymbol{x}_k|\boldsymbol{x}_0,\boldsymbol{u}_{1:k},\boldsymbol{z}_{1:k-1}\right)=N\left(\boldsymbol{A}_k\hat{x}_{k-1}+\boldsymbol{u}_k,\boldsymbol{A}_k\hat{\boldsymbol{P}}_{k-1}\boldsymbol{A}_k^\mathrm{T}+\boldsymbol{R}\right). \]
\[ \check{\boldsymbol{x}}_k=\boldsymbol{A}_k\hat{\boldsymbol{x}}_{k-1}+\boldsymbol{u}_k,\quad\check{\boldsymbol{P}}_k=A_k\hat{\boldsymbol{P}}_{k-1}\boldsymbol{A}_k^\mathrm{T}+\boldsymbol{R}. \]
\[ P\left(\boldsymbol{z}_k|\boldsymbol{x}_k\right)=N\left(\boldsymbol{C}_k\boldsymbol{x}_k,\boldsymbol{Q}\right). \]
如果结果设为 \(\displaystyle x_k\sim N(\hat{\boldsymbol{x}}_k,\hat{\boldsymbol{P}}_k)\) \[ N(\hat{\boldsymbol{x}}_k,\hat{\boldsymbol{P}}_k)=\eta N\left(\boldsymbol{C}_k\boldsymbol{x}_k,\boldsymbol{Q}\right)\cdot N(\check{\boldsymbol{x}}_k,\check{\boldsymbol{P}}_k). \]
\[ (\boldsymbol{x}_{k}-\hat{\boldsymbol{x}}_{k})^{\mathrm{T}}\hat{\boldsymbol{P}}_{k}^{-1}\left(\boldsymbol{x}_{k}-\hat{\boldsymbol{x}}_{k}\right)=\left(\boldsymbol{z}_{k}-\boldsymbol{C}_{k}\boldsymbol{x}_{k}\right)^{\mathrm{T}}\boldsymbol{Q}^{-1}\left(\boldsymbol{z}_{k}-\boldsymbol{C}_{k}\boldsymbol{x}_{k}\right)+\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right)^{\mathrm{T}}\boldsymbol{P}_{k}^{-1}\left(\boldsymbol{x}_{k}-\check{\boldsymbol{x}}_{k}\right). \]
\[ \hat{P}_k^{-1}=C_k^{\mathrm{T}}Q^{-1}C_k+\check{P}_k^{-1}. \]
\[ K=\hat{P}_kC_k^{\mathrm{T}}Q^{-1}. \]
\[ I=\hat{P}_{k}C_{k}^{\mathrm{T}}Q^{-1}C_{k}+\hat{P}_{k}\check{P}_{k}^{-1}=KC_{k}+\hat{P}_{k}\check{P}_{k}^{-1}. \]
\[ \hat{P}_{k}=(I-KC_{k})\check{P}_{k}. \]
\[ -2\hat{\boldsymbol{x}}_k^\mathrm{T}\hat{\boldsymbol{P}}_k^{-1}\boldsymbol{x}_k=-2\boldsymbol{z}_k^\mathrm{T}\boldsymbol{Q}^{-1}\boldsymbol{C}_k\boldsymbol{x}_k-2\boldsymbol{\dot{x}}_k^\mathrm{T}\check{\boldsymbol{P}}_k^{-1}\boldsymbol{x}_k. \]
\[ \hat{\boldsymbol{P}}_k^{-1}\hat{\boldsymbol{x}}_k=\boldsymbol{C}_k^\mathrm{T}\boldsymbol{Q}^{-1}\boldsymbol{z}_k+\check{\boldsymbol{P}}_k^{-1}\check{\boldsymbol{x}}_k. \]
\[ \begin{aligned} \hat{x}_{k}& =\hat{\boldsymbol{P}}_k\boldsymbol{C}_k^\mathrm{T}\boldsymbol{Q}^{-1}\boldsymbol{z}_k+\hat{\boldsymbol{P}}_k\check{\boldsymbol{P}}_k^{-1}\check{\boldsymbol{x}}_k \\ &=K\boldsymbol{z}_k+\left(\boldsymbol{I}-\boldsymbol{K}\boldsymbol{C}_k\right)\check{\boldsymbol{x}}_k=\check{\boldsymbol{x}}_k+\boldsymbol{K}\left(\boldsymbol{z}_k-\boldsymbol{C}_k\check{\boldsymbol{x}}_k\right). \end{aligned} \]
9.1.3 非线性系统和 EKF\[ \boldsymbol{x}_k\approx f\left(\hat{\boldsymbol{x}}_{k-1},\boldsymbol{u}_k\right)+\left.\frac{\partial f}{\partial\boldsymbol{x}_{k-1}}\right|_{\tilde{\boldsymbol{x}}_{k-1}}\left(\boldsymbol{x}_{k-1}-\hat{\boldsymbol{x}}_{k-1}\right)+\boldsymbol{w}_k. \]
\[ \boldsymbol{F}=\left.\frac{\partial f}{\partial\boldsymbol{x}_{k-1}}\right|_{\hat{\boldsymbol{x}}_{k-1}}. \]
\[ z_k\approx h\left(\check{\boldsymbol{x}}_k\right)+\left.\frac{\partial h}{\partial\boldsymbol{x}_k}\right|_{\dot{\boldsymbol{x}}_k}\left(\boldsymbol{x}_k-\check{\boldsymbol{x}}_k\right)+\boldsymbol{n}_k. \]
\[ H=\left.\frac{\partial h}{\partial\boldsymbol{x}_k}\right|_{\check{\boldsymbol{x}}_k}. \]
\[ P\left(\boldsymbol{x}_k|\boldsymbol{x}_0,\boldsymbol{u}_{1:k},\boldsymbol{z}_{0:k-1}\right)=N(f\left(\hat{\boldsymbol{x}}_{k-1},\boldsymbol{u}_k\right),\boldsymbol{F}\hat{\boldsymbol{P}}_{k-1}\boldsymbol{F}^\mathrm{T}+\boldsymbol{R}_k). \]
\[ \check{\boldsymbol{x}}_k=f\left(\hat{\boldsymbol{x}}_{k-1},\boldsymbol{u}_k\right),\quad\check{\boldsymbol{P}}_k=\boldsymbol{F}\hat{\boldsymbol{P}}_{k-1}\boldsymbol{F}^\mathrm{T}+\boldsymbol{R}_k. \]
\[ P\left(\boldsymbol{z}_k|\boldsymbol{x}_k\right)=N(h\left(\check{\boldsymbol{x}}_k\right)+\boldsymbol{H}\left(\boldsymbol{x}_k-\check{\boldsymbol{x}}_k\right),Q_k). \]
定义一个卡尔曼增益 \(\displaystyle \boldsymbol{K}_{k}\) \[ K_{k}=\check{P}_{k}H^{\mathrm{T}}(H\check{P}_{k}H^{\mathrm{T}}+Q_{k})^{-1}. \]
\[ \hat{\boldsymbol{x}}_k=\check{\boldsymbol{x}}_k+\boldsymbol{K}_k\left(\boldsymbol{z}_k-h\left(\check{\boldsymbol{x}}_k\right)\right),\hat{\boldsymbol{P}}_k=\left(\boldsymbol{I}-\boldsymbol{K}_k\boldsymbol{H}\right)\check{\boldsymbol{P}}_k. \]
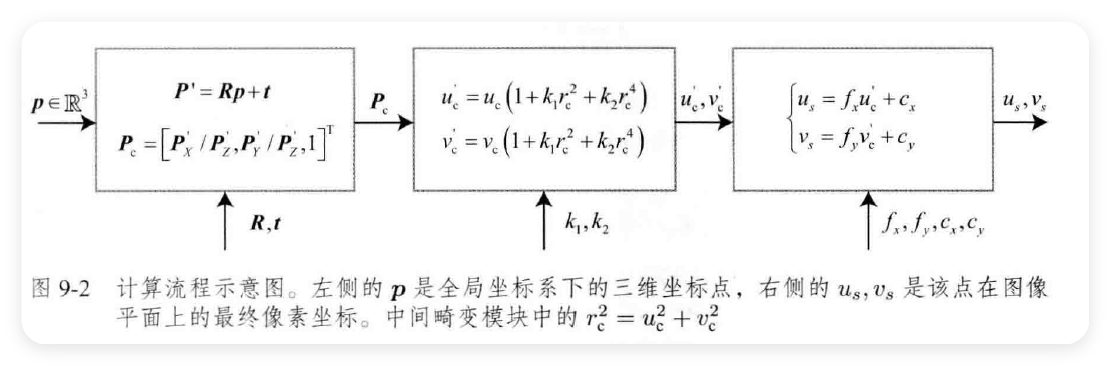
9.1.4 EKF 的讨论 局限 假设了马尔可夫性,但是非线性优化是全体时间上的 SLAM (Full-SLAM) 有非线性误差(主要问题所在) 如果把路标也放进状态,存不下 没有异常检测机制 9.2 BA 与图优化 Bundle Adjustment 从视觉图像中提炼出最有的 3 D 9.2.1 投影模型和 BA \[ P^{\prime}=Rp+t=[X^{\prime},Y^{\prime},Z^{\prime}]^\mathrm{T}. \]
\[ \boldsymbol{P}_{\mathrm{c}}=[u_{\mathrm{c}},v_{\mathrm{c}},1]^{\mathrm{T}}=[X^{\prime}/Z^{\prime},Y^{\prime}/Z^{\prime},1]^{\mathrm{T}}. \]
\[ \begin{cases}u_\mathrm{c}'=u_\mathrm{c}\left(1+k_1r_\mathrm{c}^2+k_2r_\mathrm{c}^4\right)\\v_\mathrm{c}'=v_\mathrm{c}\left(1+k_1r_\mathrm{c}^2+k_2r_\mathrm{c}^4\right)\end{cases}. \]
\[ \begin{cases}u_s=f_xu_\mathrm{c}'+c_x\\[2ex]v_s=f_yv_\mathrm{c}'+c_y\end{cases}. \]
\[ z=h(\boldsymbol{x},\boldsymbol{y}). \]
\[ e=z-h(\boldsymbol{T},\boldsymbol{p}). \]
\[ z\overset{\mathrm{def}}{\operatorname*{=}}[u_s,v_s]^\mathrm{T} \]
\[ \frac12\sum_{i=1}^m\sum_{j=1}^n\|e_{ij}\|^2=\frac12\sum_{i=1}^m\sum_{j=1}^n\|z_{ij}-h(\boldsymbol{T}_i,\boldsymbol{p}_j)\|^2. \]
9.2.2 BA 的求解\[ x=[T_1,\ldots,T_m,p_1,\ldots,p_n]^\mathrm{T}. \]
\[ \frac12\left\|f(\boldsymbol{x}+\Delta\boldsymbol{x})\right\|^2\approx\frac12\sum_{i=1}^m\sum_{j=1}^n\left\|\boldsymbol{e}_{ij}+\boldsymbol{F}_{ij}\Delta\boldsymbol{\xi}_i+\boldsymbol{E}_{ij}\Delta\boldsymbol{p}_j\right\|^2. \]
\[ x_{\mathfrak{c}}=[\boldsymbol{\xi}_1,\boldsymbol{\xi}_2,\ldots,\boldsymbol{\xi}_m]^{\mathrm{T}}\in\mathbb{R}^{6m} \]
\[ \boldsymbol{x}_p=[\boldsymbol{p}_1,\boldsymbol{p}_2,\ldots,\boldsymbol{p}_n]^\mathrm{T}\in\mathbb{R}^{3n} \]
\[ \frac12\left\|f(\boldsymbol{x}+\Delta\boldsymbol{x})\right\|^2=\frac12\left\|\boldsymbol{e}+\boldsymbol{F}\Delta\boldsymbol{x}_c+\boldsymbol{E}\Delta\boldsymbol{x}_p\right\|^2. \]
\[ \boldsymbol{J}=[\boldsymbol{F}\boldsymbol{E}]. \]
\[ H=J^\mathrm{T}J=\begin{bmatrix}F^\mathrm{T}F&F^\mathrm{T}E\\E^\mathrm{T}F&E^\mathrm{T}E\end{bmatrix}. \]
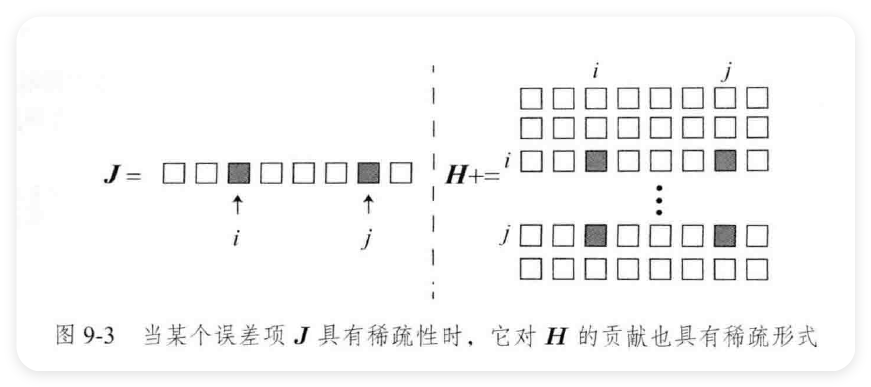
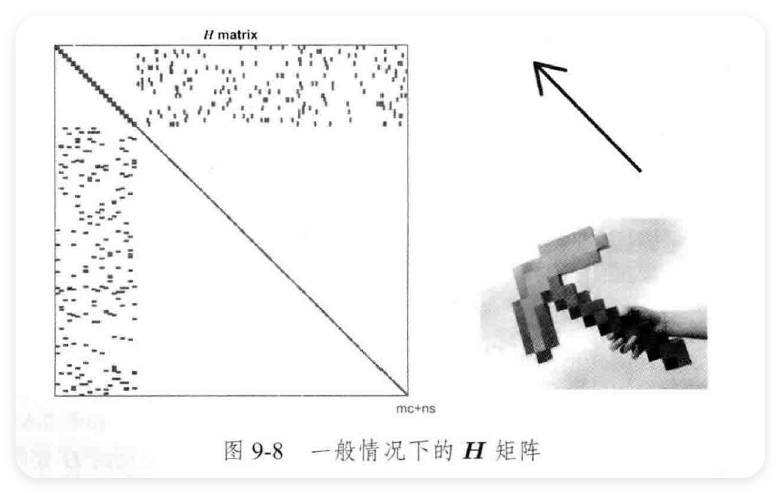
9.2.3 稀疏性和边缘化\[ J_{ij}(x)=\left(\mathbf{0}_{2\times6},\ldots\mathbf{0}_{2\times6},\frac{\partial\boldsymbol{e}_{ij}}{\partial\boldsymbol{T}_{i}},\mathbf{0}_{2\times6},\ldots\mathbf{0}_{2\times3},\ldots\mathbf{0}_{2\times3},\frac{\partial\boldsymbol{e}_{ij}}{\partial\boldsymbol{p}_{j}},\mathbf{0}_{2\times3},\ldots\mathbf{0}_{2\times3}\right). \]
\[ H=\sum_{i,j}J_{ij}^{\top}J_{ij}, \]
\[ H=\begin{bmatrix}H_{11}&H_{12}\\\\H_{21}&H_{22}\end{bmatrix}. \]
对于稀疏矩阵,我们用 Schur \[ \begin{bmatrix}B&E\\E^\mathrm{T}&C\end{bmatrix}\begin{bmatrix}\Delta x_\mathrm{c}\\\Delta x_p\end{bmatrix}=\begin{bmatrix}v\\w\end{bmatrix}. \]
\[ \begin{bmatrix}I&-EC^{-1}\\0&I\end{bmatrix}\begin{bmatrix}B&E\\E^{\intercal}&C\end{bmatrix}\begin{bmatrix}\Delta x_\mathrm{c}\\\Delta x_p\end{bmatrix}=\begin{bmatrix}I&-EC^{-1}\\0&I\end{bmatrix}\begin{bmatrix}v\\w\end{bmatrix}. \]
\[ \begin{bmatrix}B-EC^{-1}E^\mathrm{T}&0\\E^\mathrm{T}&C\end{bmatrix}\begin{bmatrix}\Delta x_\mathrm{c}\\\Delta x_p\end{bmatrix}=\begin{bmatrix}v-EC^{-1}w\\\\w\end{bmatrix}. \]
\[ \begin{bmatrix}B-EC^{-1}E^\mathrm{T}\end{bmatrix}\Delta x_\mathrm{c}=v-EC^{-1}w. \]
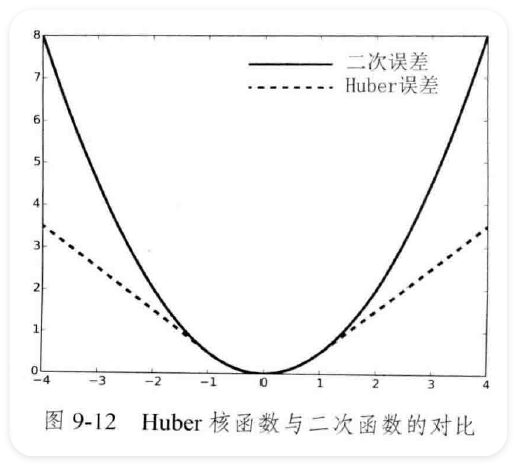
优势 \(\displaystyle \boldsymbol{C}\) 非对角线上的非零矩阵块表示对应的两个相机变量之间存在共同观测的路标点,即共视(Co-visibility) 9.2.4 鲁棒核函数\[ H(e)=\begin{cases}\frac{1}{2}e^2&\text{当}|e|\leqslant\delta,\\\\\delta\left(|e|-\frac{1}{2}\delta\right)&\text{其他}\end{cases} \]
9.3 实践 : Ceres BA9.3.1 BAL 数据集9.3.2 Ceres BA 的书写9.4 实践 : g 2 o BA9.5 小结10 后端 211 回环检测12 建图13 实践 : SLAM 14 SLAM: 现在与未来 December 21, 2024 02:51:03 October 16, 2024 11:25:21